- Brushless Motor
- Powerful
- Highly Integrated
- Precision Reducer
- Temperature and Position Sensors
- High-Speed Communication
The YS-342026 series digital servo is a modular driver, consisting of a gear reducer, a brushless high-speed motor, and a control board package.
The motor and reducer are highly integrated, with a compact size, built-in temperature sensor, and support for multiple operating modes.
Equipped with a standard brushless high-speed motor, it has strong power, longer service life, and significantly improved precision and response speed.
The J288 model is an upgraded version of the S288 model, upgraded from engineering plastic gears and engineering plastic shells to metal gears and aluminum alloy shells, thereby enhancing heat dissipation, servo life, and impact resistance.
Can be widely used in various robot joints and power components such as robotic arms and dexterous hands.
The first choice for robot competitions, DIY creation, scientific research and education, and the robot field.
DIY Creation

Scientific Research and Education

Motion Joints
Robot Competitions
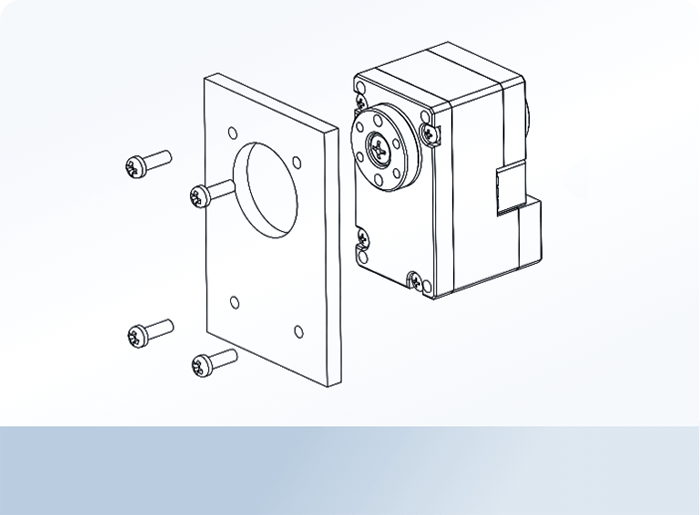
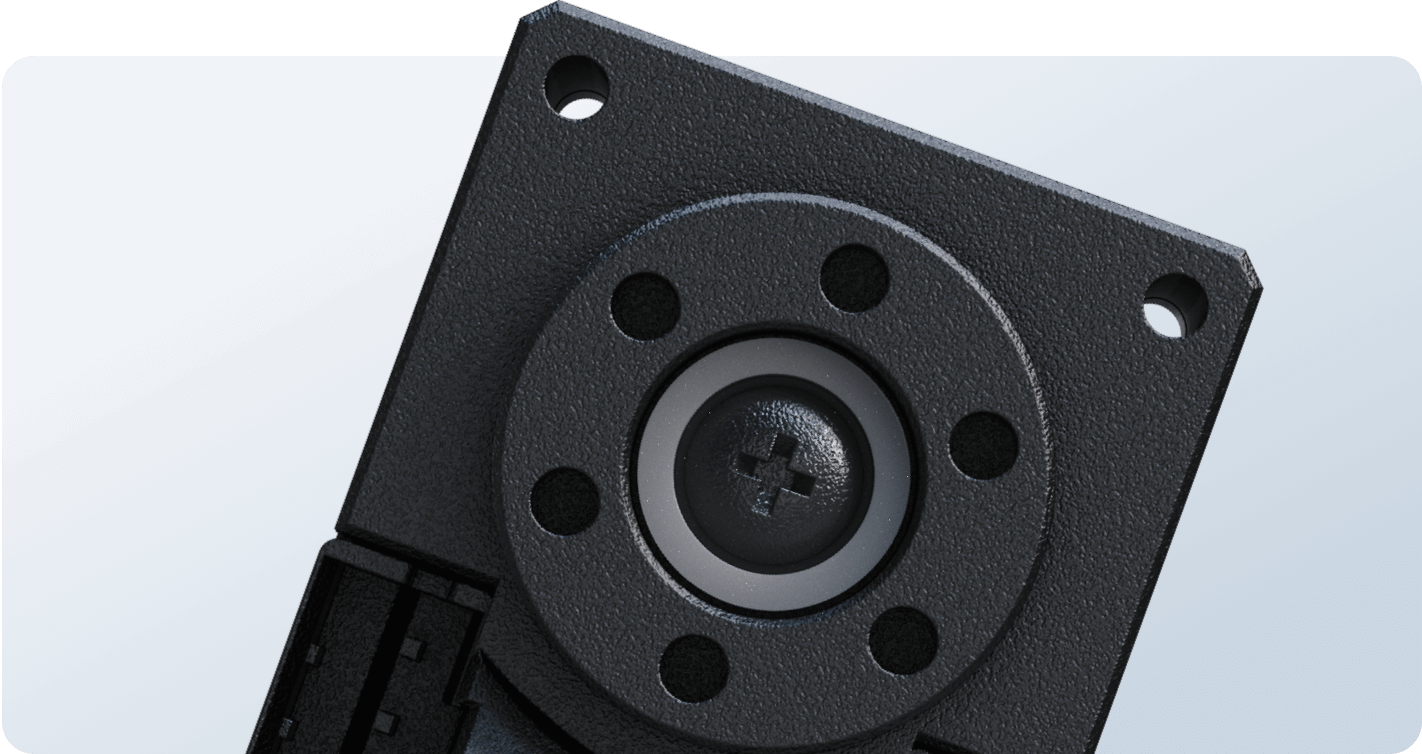
Front Fixing Diagram
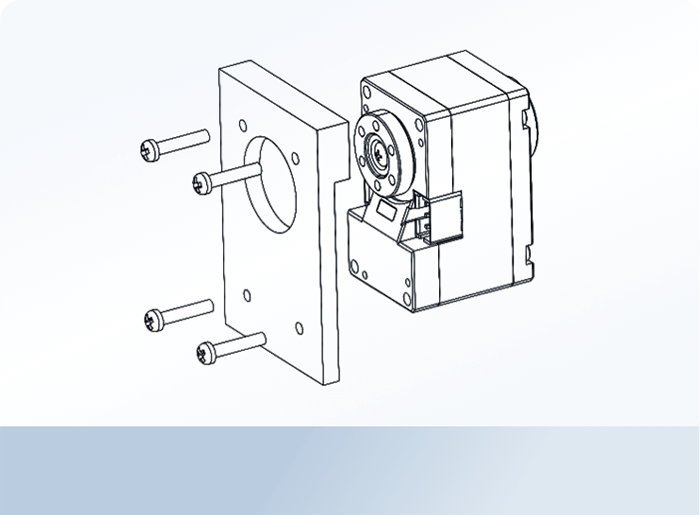
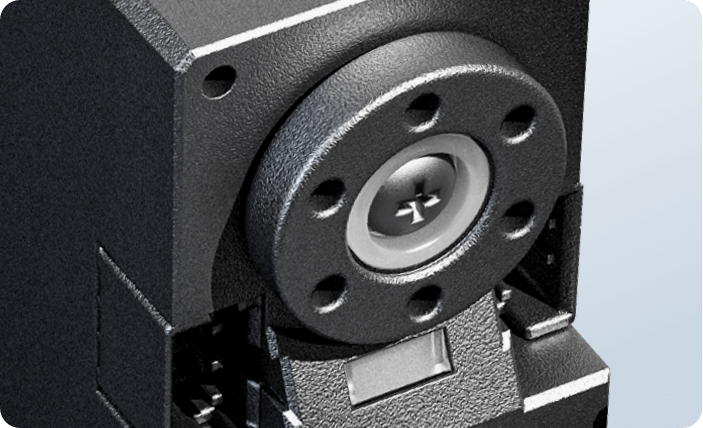
Back Fixing Diagram
Model
YS-
342026-S288
YS-
342026-J288
Min.
6.4V
6.4V
Recommended
12.6V
25.2V
Max.
12.6V
25.2V
Voltage
12.6V
25.2V
No-Load Current
0.27A@12V
0.45A@25.2V
0.27A@12V
Maximum Line Current
0.32A
1.92A
Maximum (No-Load) Speed
16.5rad/s
35rad/s@25.2V
16.5rad/s@12V
Torque Constant
0.554Nm/A
0.554Nm/A
Maximum (Stall) Torque
The Torque Is In The Same Direction As The Speed: 0.07Nm
The Toque Is In The Opposite Direction of The Rotational Speed: 0.2Nm
The Torque Is In The Same Direction As The Speed: 0.5Nm
The Toque Is In The Opposite Direction of The Rotational Speed: 1.5Nm
Min.
-20℃
-20℃
Max.
The driver board shuts down and reports an overheat error when exceeding 90 degrees
The winding shuts down and reports an overheat error when exceeding 120 degrees
The driver board shuts down and reports an overheat error when exceeding 90 degrees
The winding shuts down and reports an overheat error when exceeding 120 degrees
Position Sensor
Rotor, output end, dual absolute value encoder
Rotor, output end, dual absolute value encoder
Motor
Brushless Motor
Brushless Motor
Baud Rate
6,000,000bps
6,000,000bps
Control Algorithm
Hybrid Control
Hybrid Control
Gear Type
Spur Gear
Spur Gear
Gear Material
Engineering Plastic
Steel
Shell Material
Engineering Plastic
Aluminum Alloy
Dimensions (W x H x D)
20 x 34 x 26mm
20 x 34 x 26mm
Weight
19.5g
35g
Gear Ratio
288.35:1
288.35:1
Command Signal
Digital data packet
Digital data packet
Rotor End Encoder Resolution
15bit
15bit
Protocol Type
Half-duplex asynchronous serial communication
(8bit, 1stop, No Parity)
Half-duplex asynchronous serial communication
(8bit, 1stop, No Parity)
Connection (Physical)
TTL level multi-point bus
TTL level multi-point bus
ID
0-14
0-14
Motor Sensing Feedback
Rotor torque, Rotor angle, Output end angle, Rotor angular velocity, Temperature, Voltage, Error status
Rotor torque, Rotor angle, Output end angle, Rotor angular velocity, Temperature, Voltage, Error status
Protocol Version
Unitree Custom Protocol
Unitree Custom Protocol
Operating Mode / Angle
Hybrid mode: Rotor torque, Rotor angle, Rotor angular velocity, Rotor stiffness, Rotor damping
Hybrid mode: Rotor torque, Rotor angle, Rotor angular velocity, Rotor stiffness, Rotor damping
Standby Current
0.05A@12V
0.026A@25.2V
0.05A@12V
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.