Robot
Components

Bionic Robot Joint Motor
Small Size Giant power

Brushless Digital Servo
Compact and Designed for Embodied Intelligence Applications

SV1-25
Embodied Stereo Binocular Camera

A1 Motor
Stable and Efficient with Hardcore Strength

GO-M8010-6
Bionic Robot Joint Motor

Super Robot Waterproof Joints B1-16
IP68 Industrial Waterproof, Long-term Operation
Accessory

R1 Battery
Fast charging, powerful discharging

Go2 Battery
Fast Charging, Long-lasting Standby

Go2 Charger
High Security Protection, Fast Charging

R3 Controller
Newly Upgraded, Immersive Interaction

Go2 Foot End
Sense-sensitive, Reliable and Durable

Go1 Battery
Fast Charging, Long-lasting Standby

A1 Battery
Strong Power, Extraordinary Performance

Aliengo Battery
Excellent Motivation, Unlimited Ability
Industrial Applications
Services And Support
About Unitree
APP Download








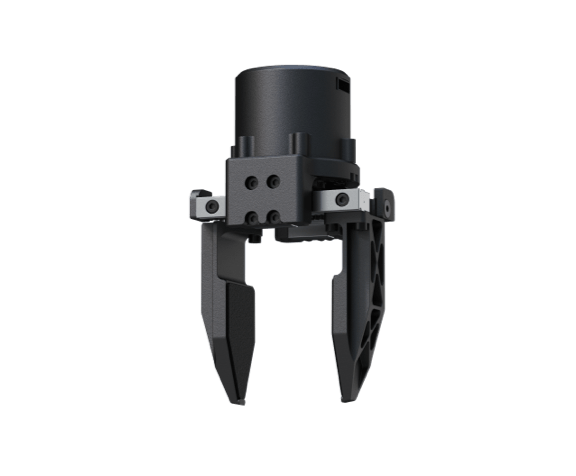



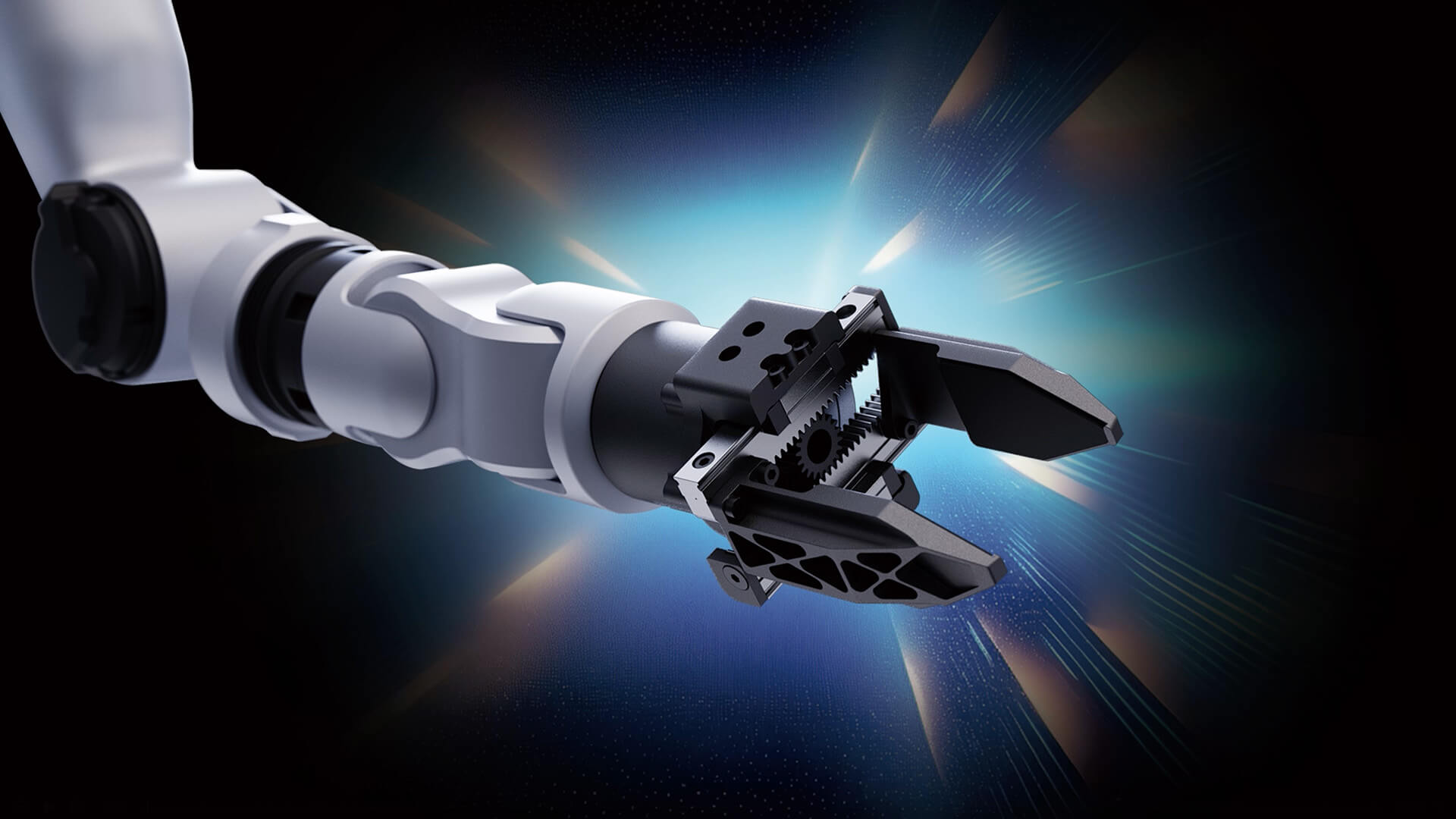
Unitree Dex1-1
Professional and refined
designed specifically for embodied AI applications


Scientific Research and Education

Courier Sorting

Consumer Electronics
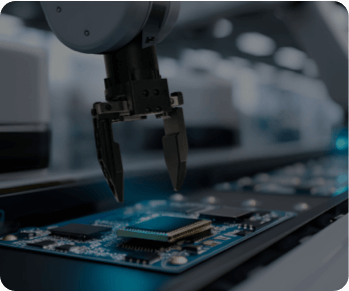
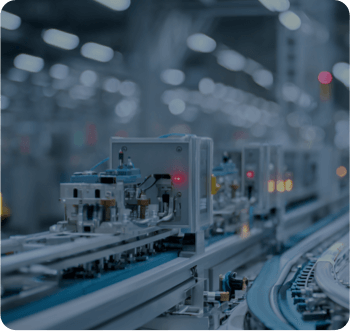
Industrial Automation
New Retail

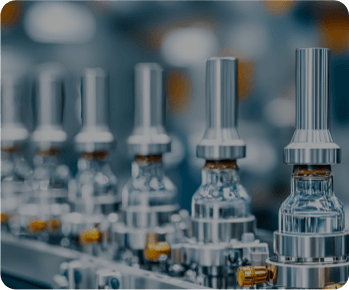
Medicine
- Standalone use
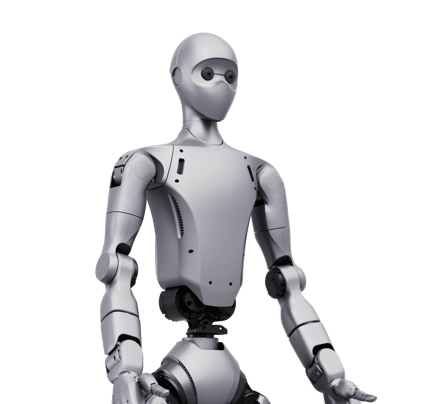
- Unitree's G1 humanoid robots
- Unitree's H2 humanoid robots
- Unitree's R1 humanoid robots
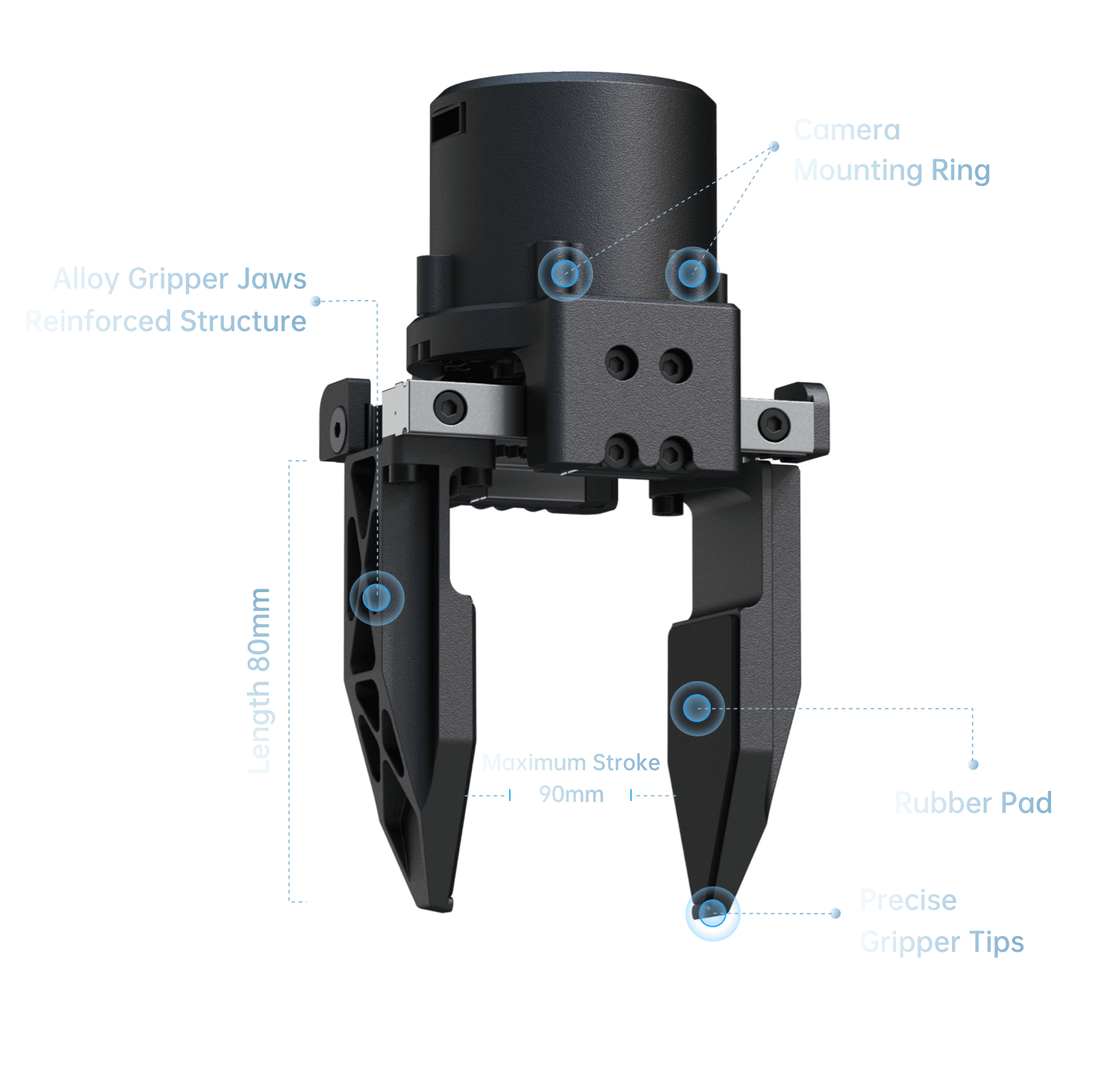
Dex1-1 Gripper - Standard Version

Dex1-1 Gripper - Advanced Version (with Camera)
1080P FPS: 30/60
FOV: H:118° V:87° D:140°


Gripper Parameters
Model
Dex1-1
Dimensions
143mm x 78mm x 67mm [1]
Weight
550g
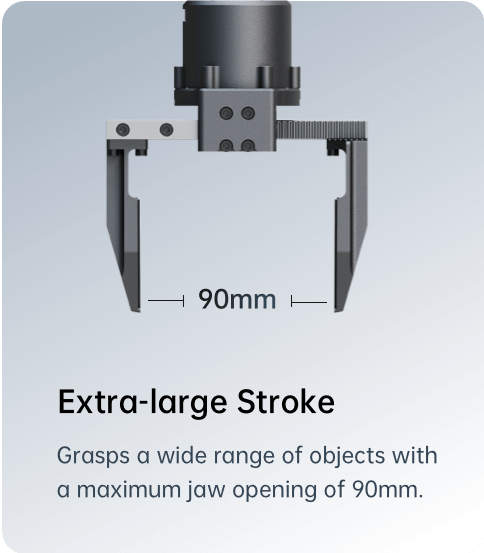
Stroke
90mm
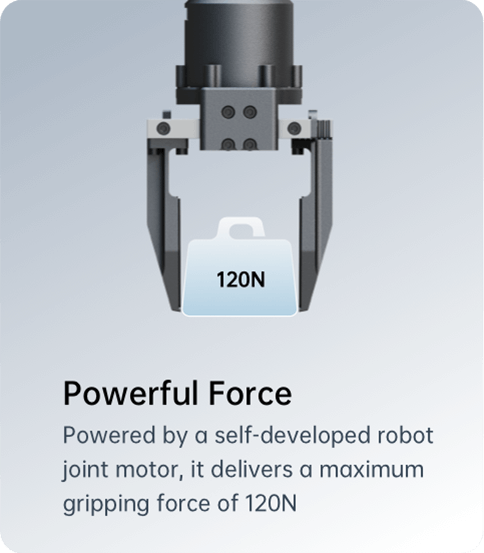
Gripping Force (Adjustable)
5~120N [2]
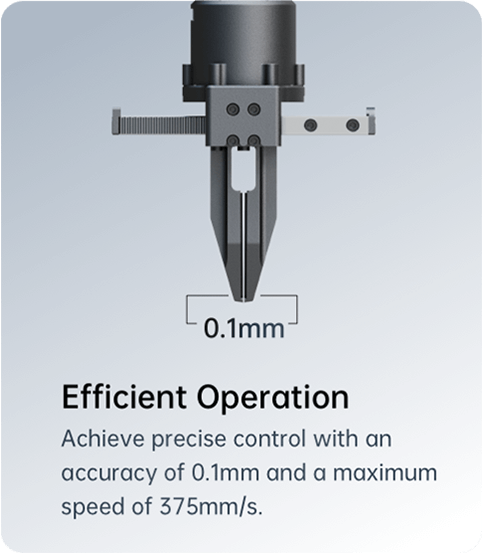
Speed (Adjustable)
50~375 mm/s [2]
Position Resolution (Fingertip)
0.1mm
Grasp Load (Form-fitting)
20kg [3]
Grasp Load (Friction)
5kg [4]
Full-stroke Shortest Closing Time
0.24s [2]
Jaw Length
80mm
Motor Parameters
Communication Protocol
High-speed 485
Communication Baud Rate
6Mbps
Communication Control Frequency
1000Hz
Operating Voltage
24V~64V (24/48VDC recommended)
Static Current
0.03A
Peak Line Current
3.5A
Motor Peak Torque
5N.m
Motor Maximum Speed
27rad/s (with 64V power supply)
Recommended Operating Environment
-20℃ ~ 60℃
Motor Reduction Ratio
1:25
Motor Encoder Resolution
15bit
Motor Encoder Type
Absolute encoder
Motor Status Feedback
Angle, Angular Velocity, Torque, Temperature
Motor Control Instruction
Angle, Angular Velocity, Torque, Stiffness, Damping
[1]
The gripper's width is 78mm when half-open. Its width is 120mm when fully open and 124.5mm when fully closed (with the side rails extended).
[2]
The listed values for speed, gripping force, and full-stroke closing time are measured under varying conditions (24V-60V) by adjusting motor stiffness, damping, and torque. These values may vary depending on the application; please refer to your specific use case.
[3]
Grasp Load (Form-fitting) refers to the maximum horizontal load the gripper can hold without losing its grip. This value may vary depending on the application; please refer to your specific use case.
[4]
Grasp Load (Friction) refers to the maximum vertical load the gripper can hold without slipping, as measured with a square steel block. This value may vary depending on the application; please refer to your specific use case.
[5]
All parameters listed above may vary in different application scenarios or with different model configurations. Please refer to your specific use case.
[6]
The product appearance is subject to change. Please refer to the final product.
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.