机器人
行业应用
服务与支持
关于宇树
APP 下载








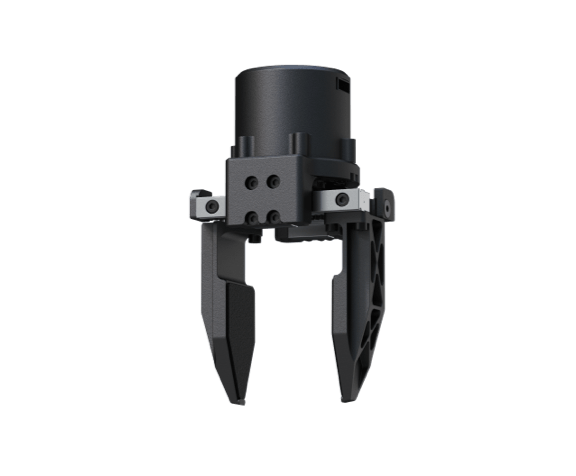

















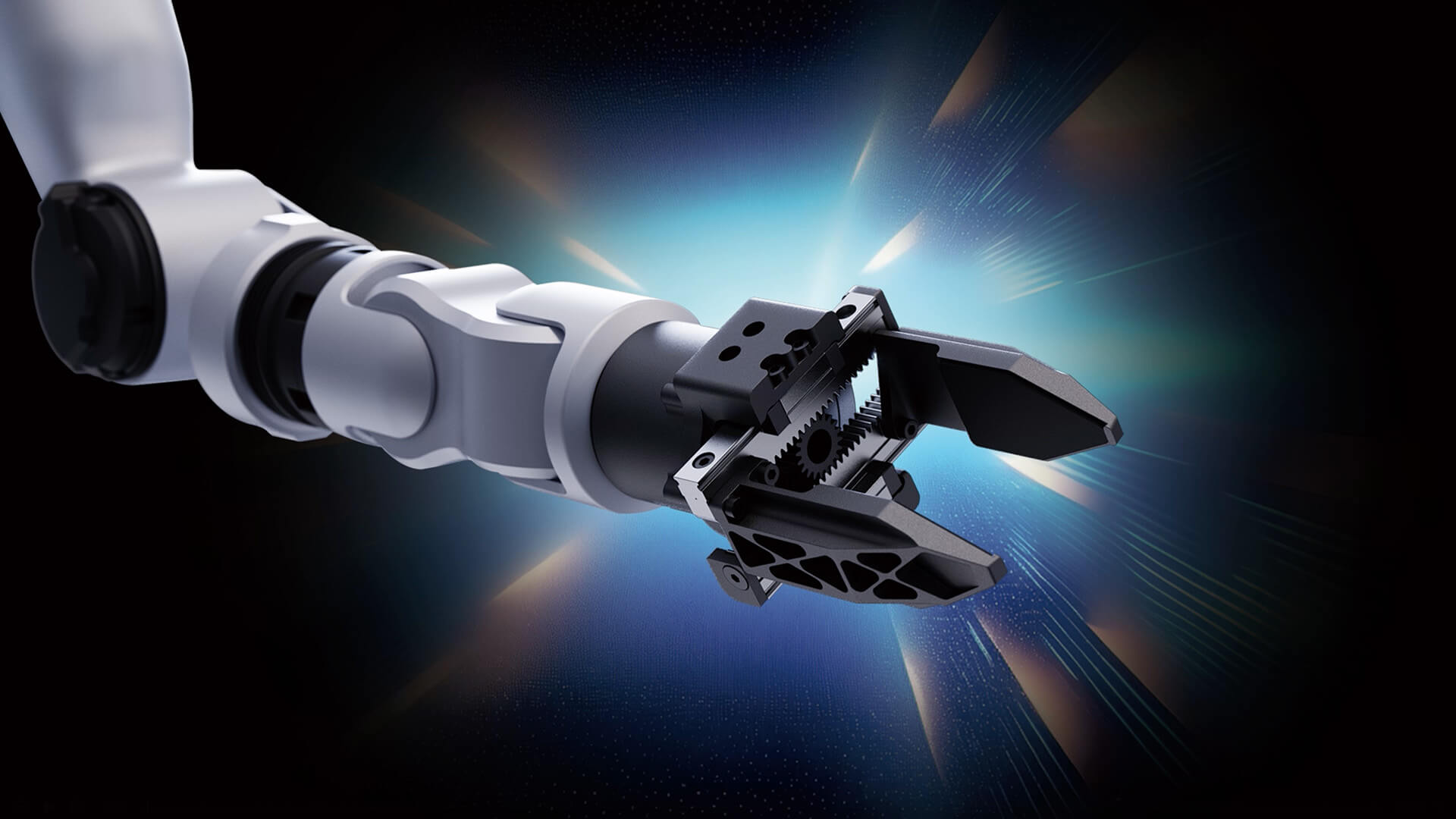
Unitree Dex1-1
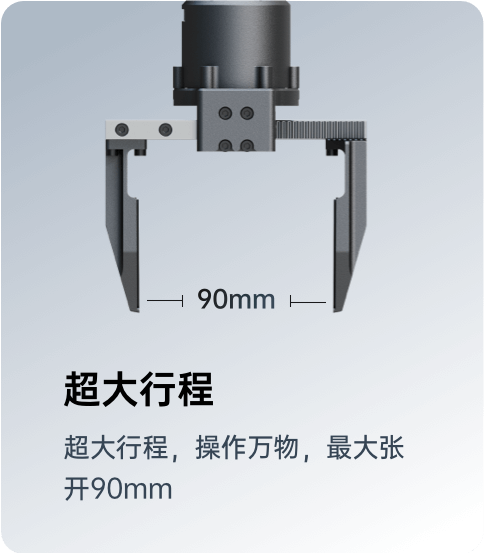
精巧专业
为具⾝智能应⽤⽽⽣



教育科研

快递分拣

消费电子
工业自动化
新零售

医药
- 独立使用
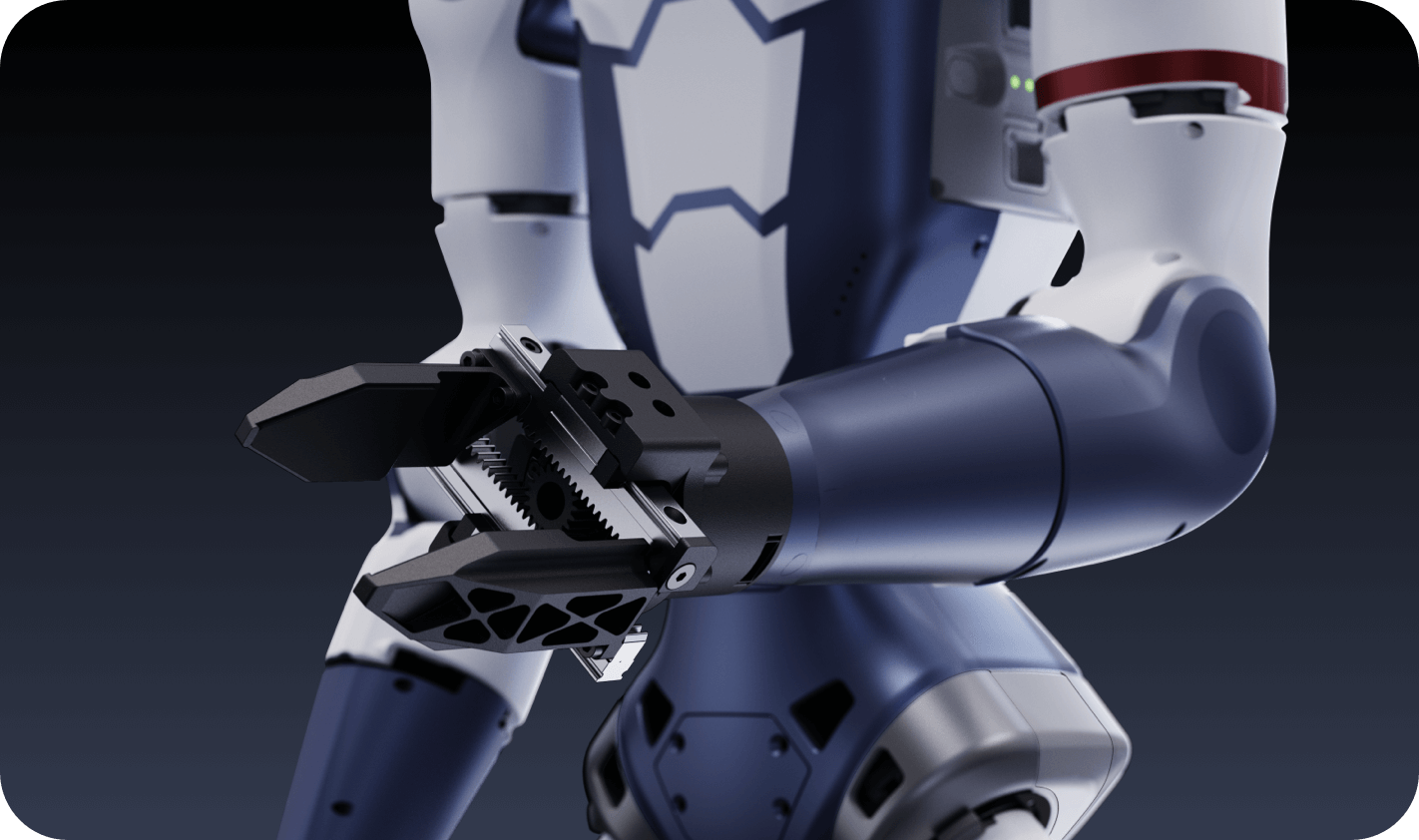
- 人形机器人G1
- 人形机器人H2
- 人形机器人R1
Dex1-1夹爪-标准版

Dex1-1夹爪-进阶版(带相机)
1080P FPS: 30/60
FOV: H:118° V:87° D:140°


夹爪参数
型号
Dex1-1
尺寸
143mm x 78mm x 67mm [1]
重量
550g
行程
90mm
夹力(可调整)
5~120N [2]
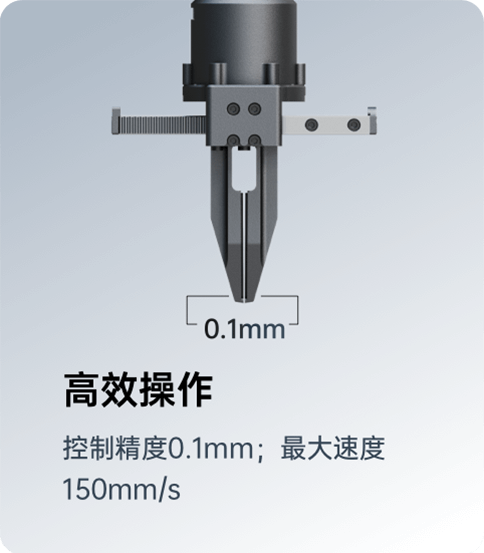
速度(可调整)
50~375 mm/s [2]
位置分辨率(指尖)
0.1mm
抓握载荷(适形)
20kg [3]
抓握载荷(摩擦)
5kg [4]
全行程最短闭合时间
0.24s [2]
爪长
80mm
电机参数
通信协议
高速485
通信波特率
6Mbps
通信控制频率
1000Hz
⼯作电压
24V~64V (推荐24/48VDC)
静态电流
0.03A
峰值线电流
3.5A
电机峰值扭矩
5N.m
电机最⼤转速
27rad/s (64V供电时)
推荐使⽤环境
-20℃ ~ 60℃
电机减速⽐
1:25
电机编码器分辨率
15bit
电机编码器类型
绝对值编码器
电机状态反馈
角度、角速度、力矩、温度
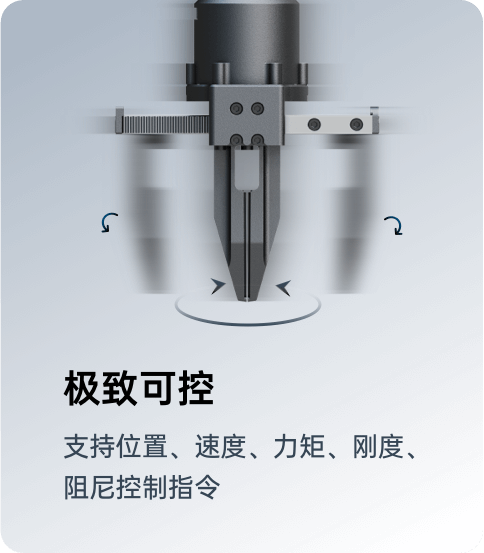
电机控制指令
角度、角速度、力矩、刚度、阻尼
[1]
夹爪尺寸的宽度78mm是指夹爪半张开时对应的最小宽度, 夹爪全张开时宽度为120mm, 全闭合时两侧导轨伸出宽度为124.5mm。
[2]
速度、夹力、全行程最短闭合时间是在不同电压下(24V~60V),通过调整电机刚度、阻尼、力矩后测得,在不同应用场景中有所差异,请以实际为准。
[3]
抓握载荷(适形)是指夹爪横向挂住物体不松动情况下,所能承受的最大重量,在不同应用场景中有所差异,请以实际为准。
[4]
抓握载荷(摩擦)是指夹爪竖直夹住方形物体(钢块)不掉落情况下对应物体的最大重量,在不同应用场景中有所差异,请以实际为准。
[5]
以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准。
[6]
产品外观后续可能会有升级调整,请以届时实物为准。
本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
请访问宇树科技官网了解更多产品相关条款与政策,请遵守各地区法律法规。