Robot
Components

Bionic Robot Joint Motor
Small Size Giant power

Brushless Digital Servo
Compact and Designed for Embodied Intelligence Applications

SV1-25
Embodied Stereo Binocular Camera

A1 Motor
Stable and Efficient with Hardcore Strength

GO-M8010-6
Bionic Robot Joint Motor

Super Robot Waterproof Joints B1-16
IP68 Industrial Waterproof, Long-term Operation
Accessory

R1 Battery
Fast charging, powerful discharging

Go2 Battery
Fast Charging, Long-lasting Standby

Go2 Charger
High Security Protection, Fast Charging

R3 Controller
Newly Upgraded, Immersive Interaction

Go2 Foot End
Sense-sensitive, Reliable and Durable

Go1 Battery
Fast Charging, Long-lasting Standby

A1 Battery
Strong Power, Extraordinary Performance

Aliengo Battery
Excellent Motivation, Unlimited Ability
Industrial Applications
Services And Support
About Unitree
APP Download







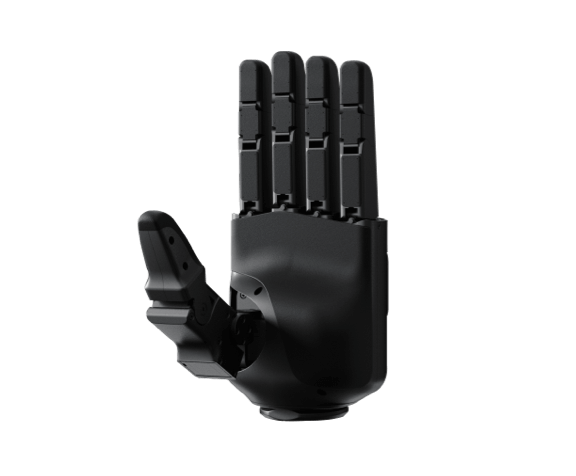



Unitree Dex2/5
Gala-style tendon-driven dexterous hand, precise control for unbeatable strength.
10‑DOF (2 actuated) 5‑finger tendon‑driven dexterous hand
 Ultra-long fatigue life for greater durability
Ultra-long fatigue life for greater durabilityThe entire hand has passed over 100000 fatigue cycles
Ensuring stable and reliable long-term operation
 Rugged impact resistance, impervious to knocks and bumps
Rugged impact resistance, impervious to knocks and bumpsCompleted over 100 drop tests
Superior robust design ensures the dexterous hand is no longer fragile
 Hidden internal wiring
Hidden internal wiringCompatible with G1/R1 models
Let the "meridians" run beneath the "skin"

Parameters
Weight
365g
Size
151mm x 70mm x 63mm [1]
Degrees of Freedom
Thumb×1
Index Finger、Middle Finger、Ring Finger、Little Finger:share one DOF
Transmission Mechanism
Gear‑tendon rope drive
Angle of Joint
Thumb Joint 0:0~42°
Thumb Joint 1:0~105°
Four-Finger Joint0:0~88°
Four-Finger Joint1:0~105°
Minimum fist clench time
0.5 s
Minimum grip diameter
8mm
Fingertip strength
Thumb:15N
Index finger, middle finger, ring finger, little finger: total 15 N
Working Voltage
24V-60V
Static Current
58V@0.1A
Maximum Current
58V@1.5A
Communication Interface
RS485
Working Temperature Range
-20℃ ~ 60℃
Load Conditions ( Palm Facing Down At Room Temperature, Grasping A 5cm Round Hard Object)
The Maximum Weight is 1.5kg
Load Conditions (Palm Facing Left At Room Temperature, Grasping A 5cm Round Hard Object)
The Maximum Weight is 1.5kg
Software Function
Communication Rate
1000Hz
Perceptual Feedback
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Temperature, Voltage and Current
Control Feedback
Joint Mode, Joint Position, Joint Velocity, Joint Torque, Joint Stiffness Coefficient, Joint Damping Coefficient
[1]
It is the size of the dexterous hand in flat state.
[2]
All parameters listed above may vary in different application scenarios or with different model configurations. Please refer to your specific use case.
[3]
The product appearance is subject to change. Please refer to the final product.
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.