机器人
行业应用
服务与支持
关于宇树
APP 下载

























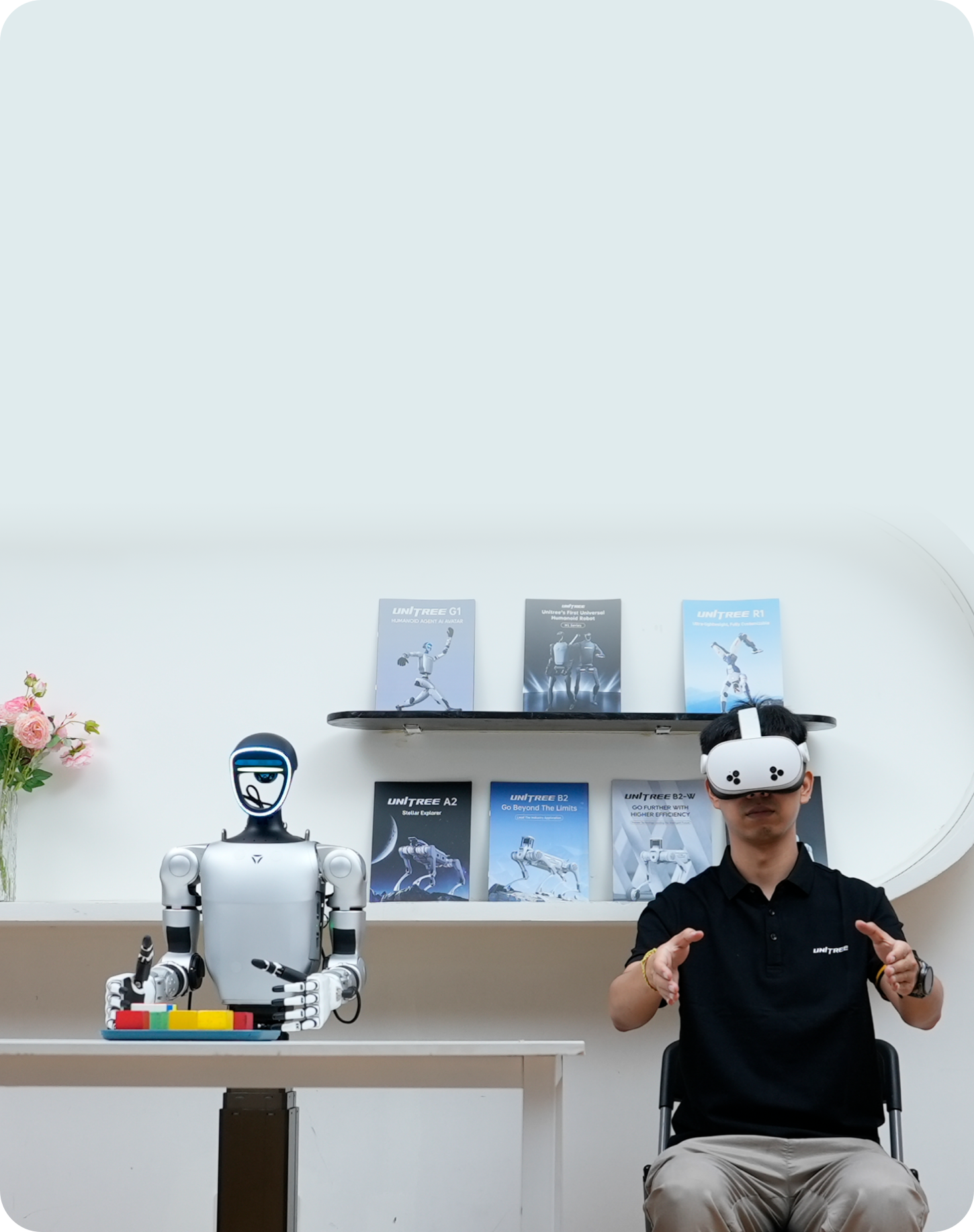
解码智能体进化原数据
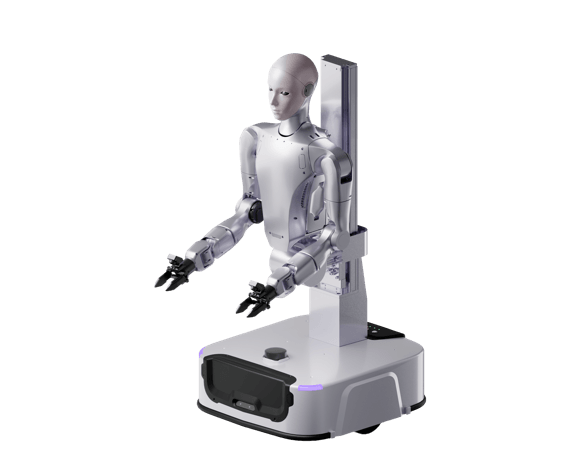
解决方案组成
 更高自由度的本体总自由度
更高自由度的本体总自由度整机自由度(不含末端):
19
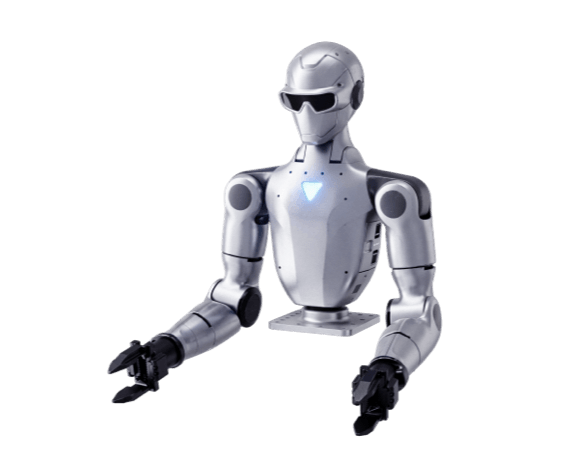
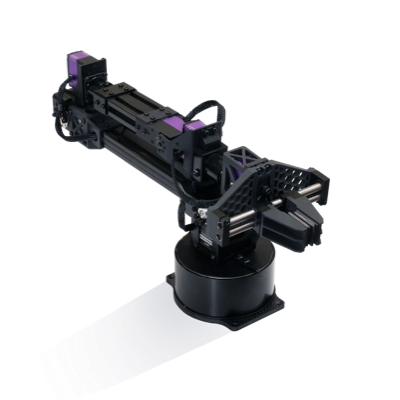
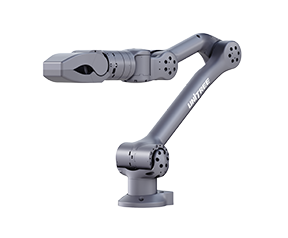
手臂自由度:
7×2
腰部自由度:
2
立柱自由度:
1
底盘自由度:
2
 更大范围的作业空间
更大范围的作业空间作业空间:
采用轮式与升降相结合的移动升降设计
垂直作业空间:
0-2m
腰关节运动空间:
Z±155°、Y -2.5°~+135°
 更低延时的控制响应
更低延时的控制响应升降精度:
±0.5mm
末端夹爪精度:
±0.1mm
*不同末端配置精度有差异
系统遥操延时:
﹤100ms
采集频率:
60Hz
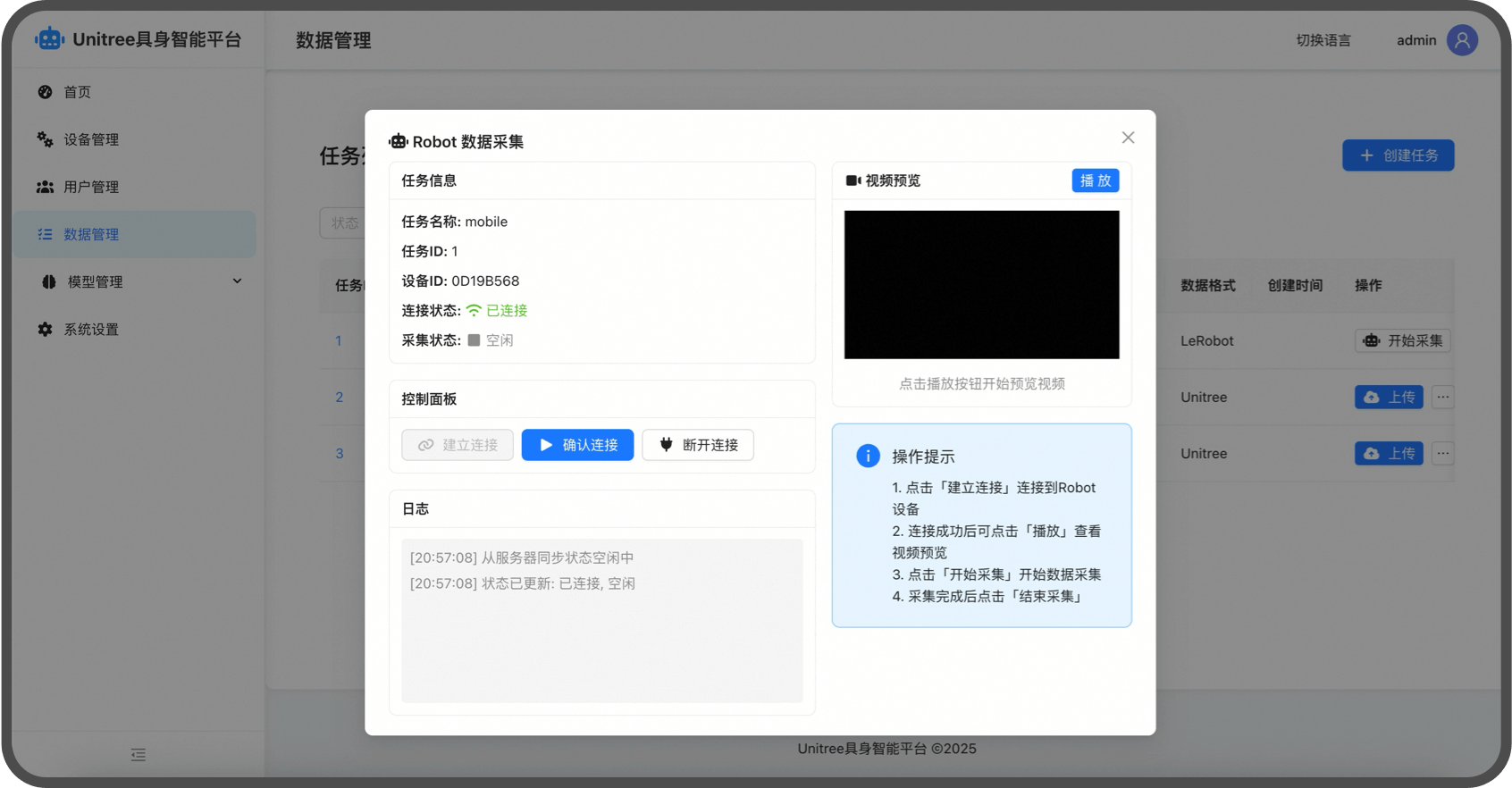
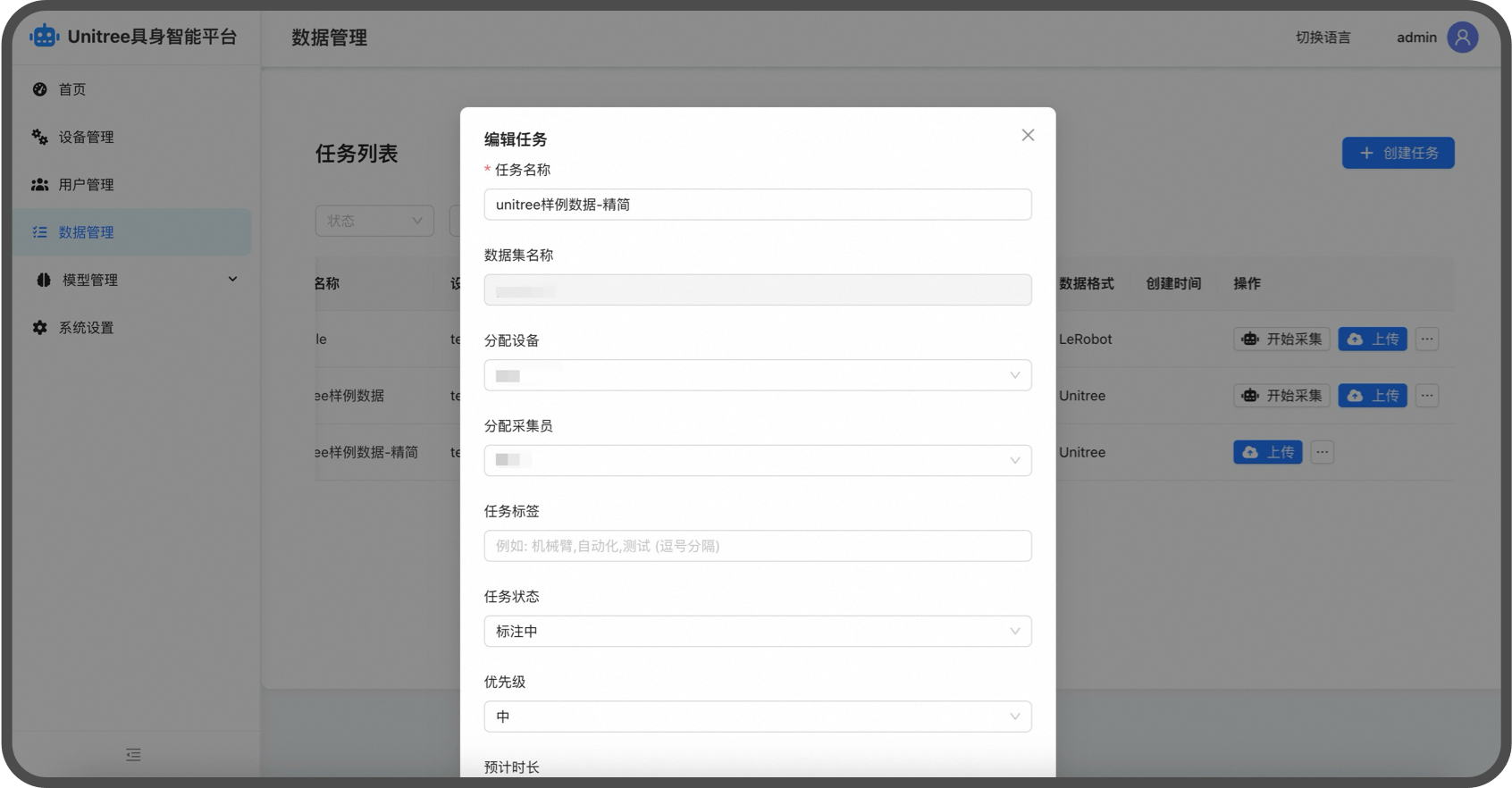
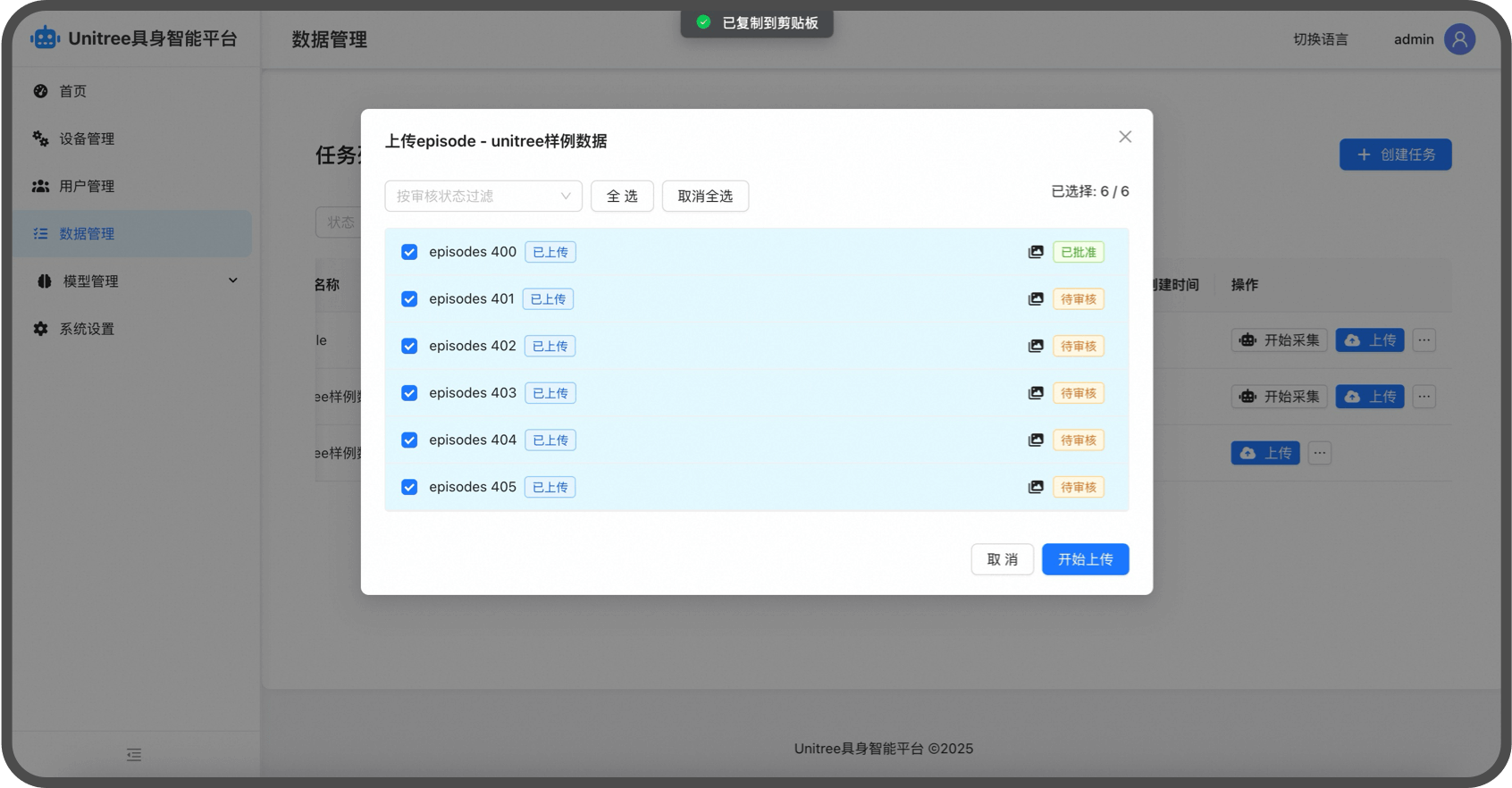
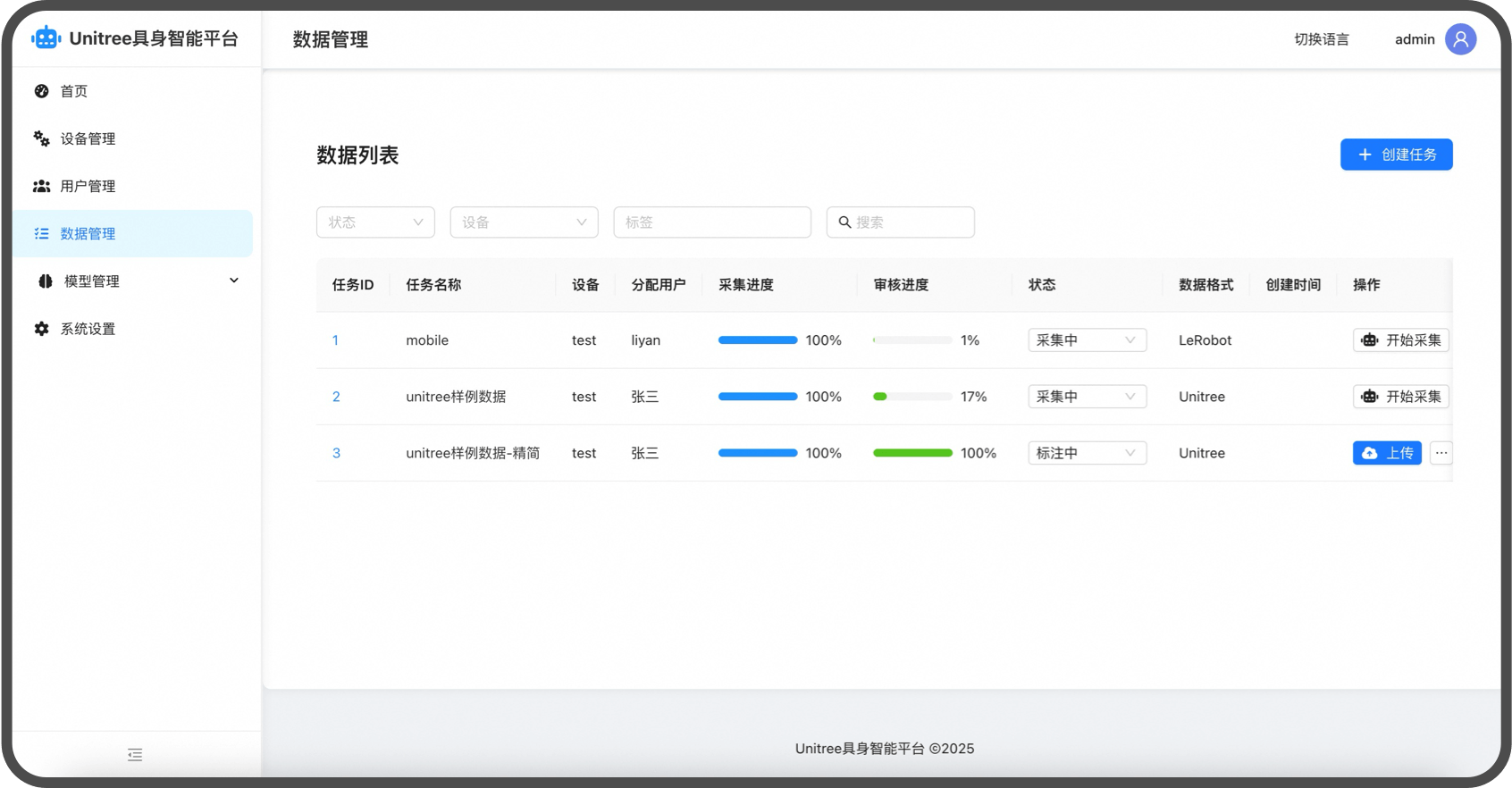
系统化的数据采集工具
通过标准化流程和可重构场景,提升场景数据采集效率,降低传统采集方式的成本。
1
新建采集任务
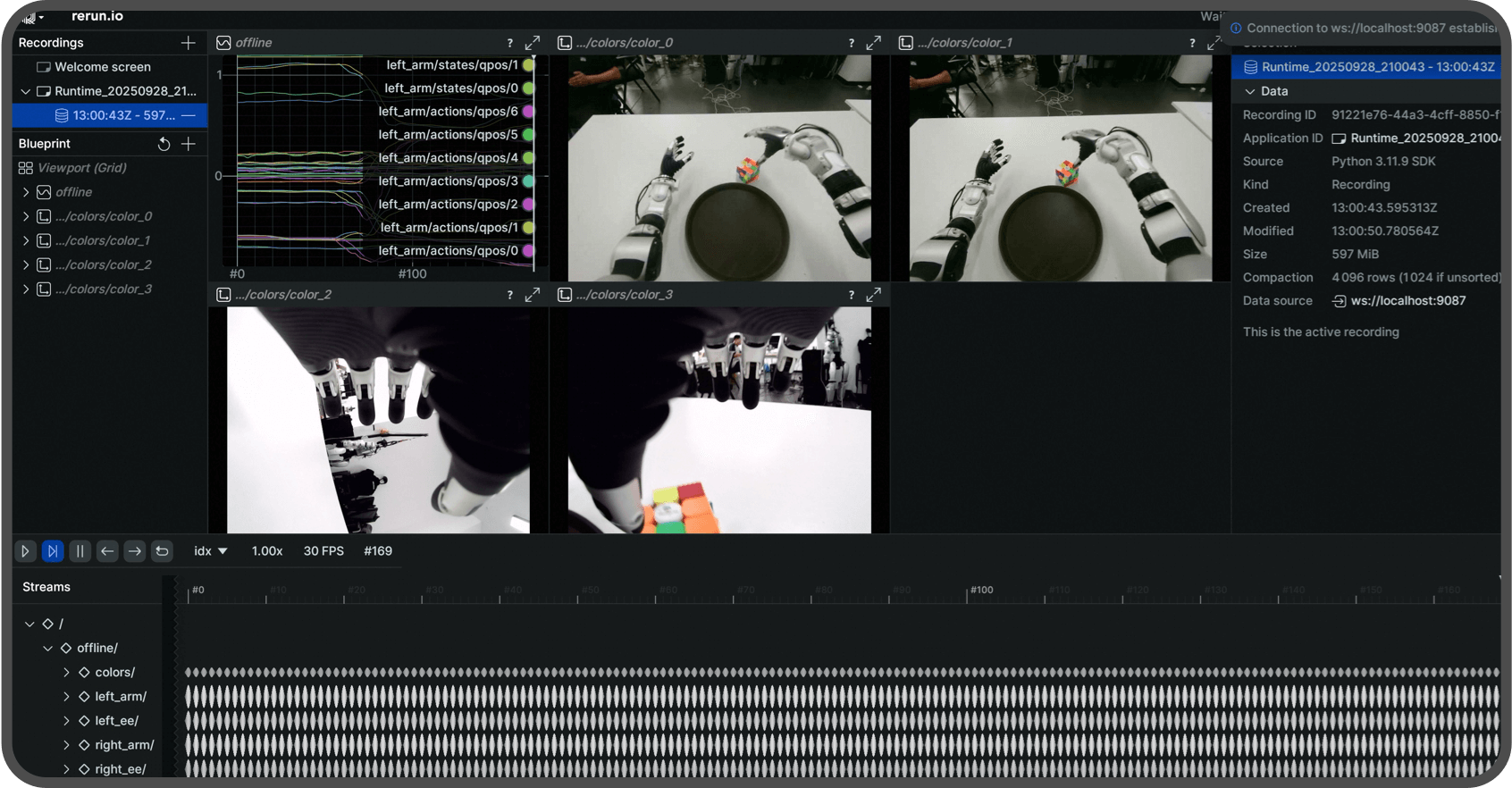
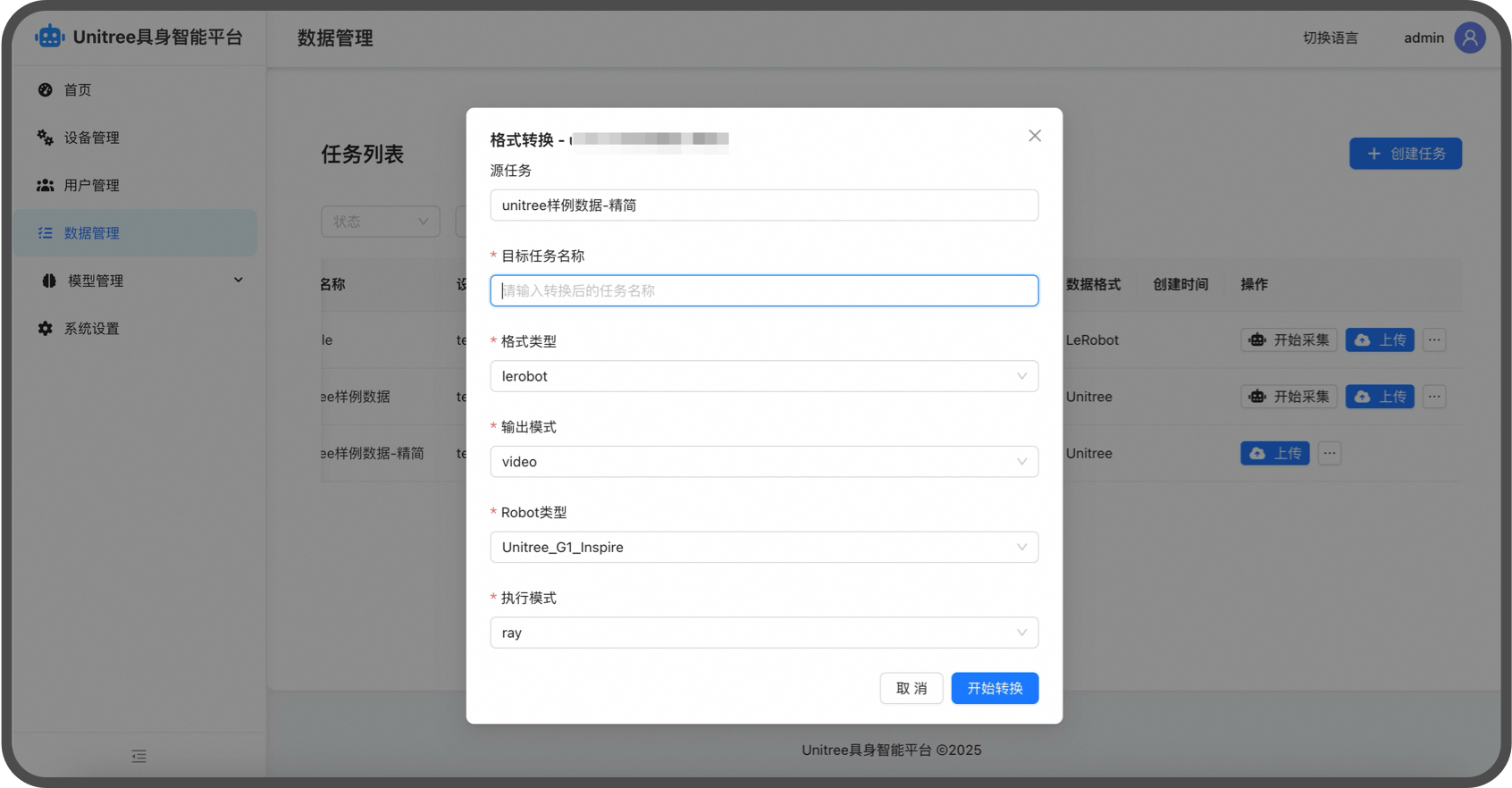
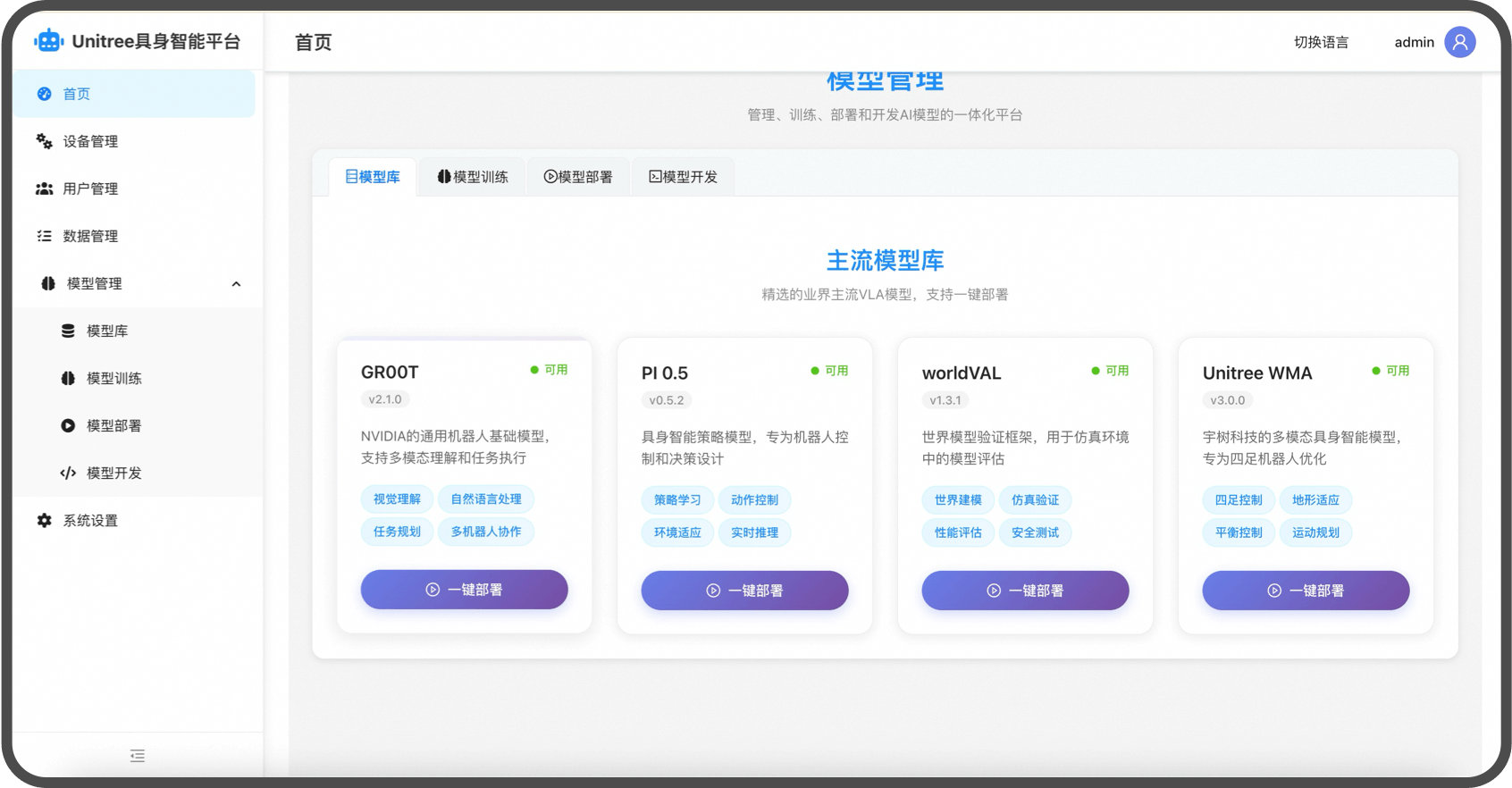
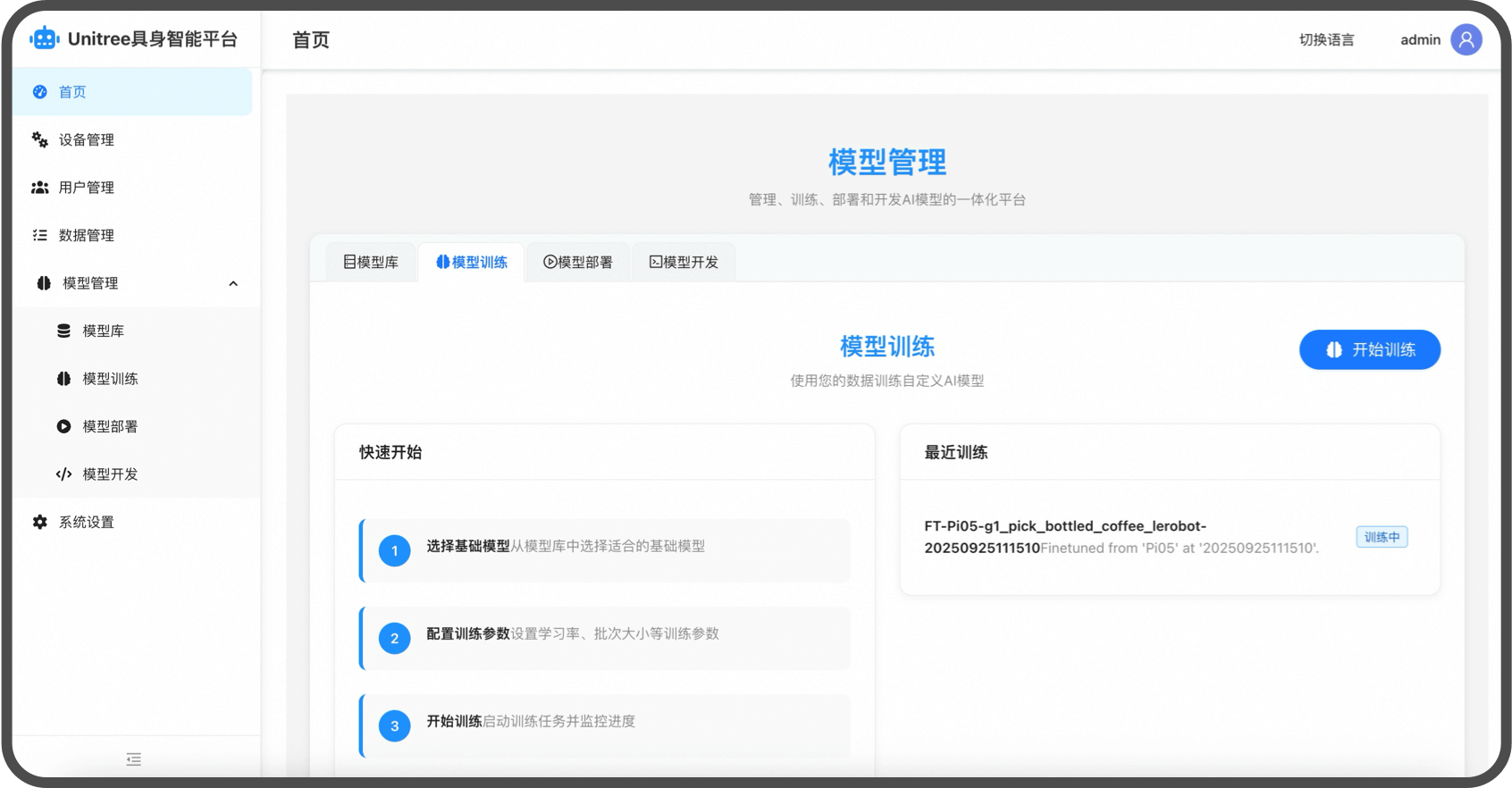
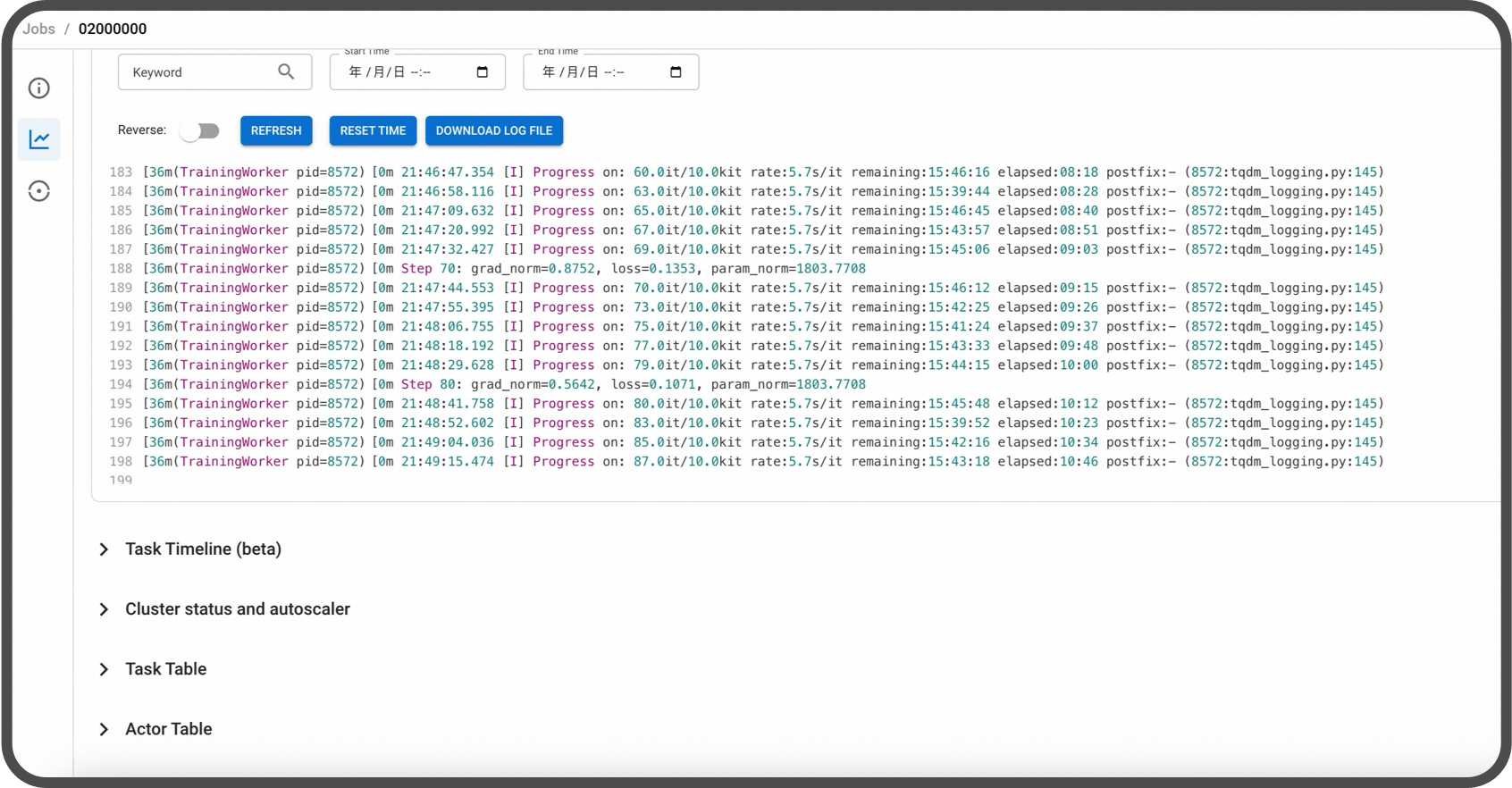
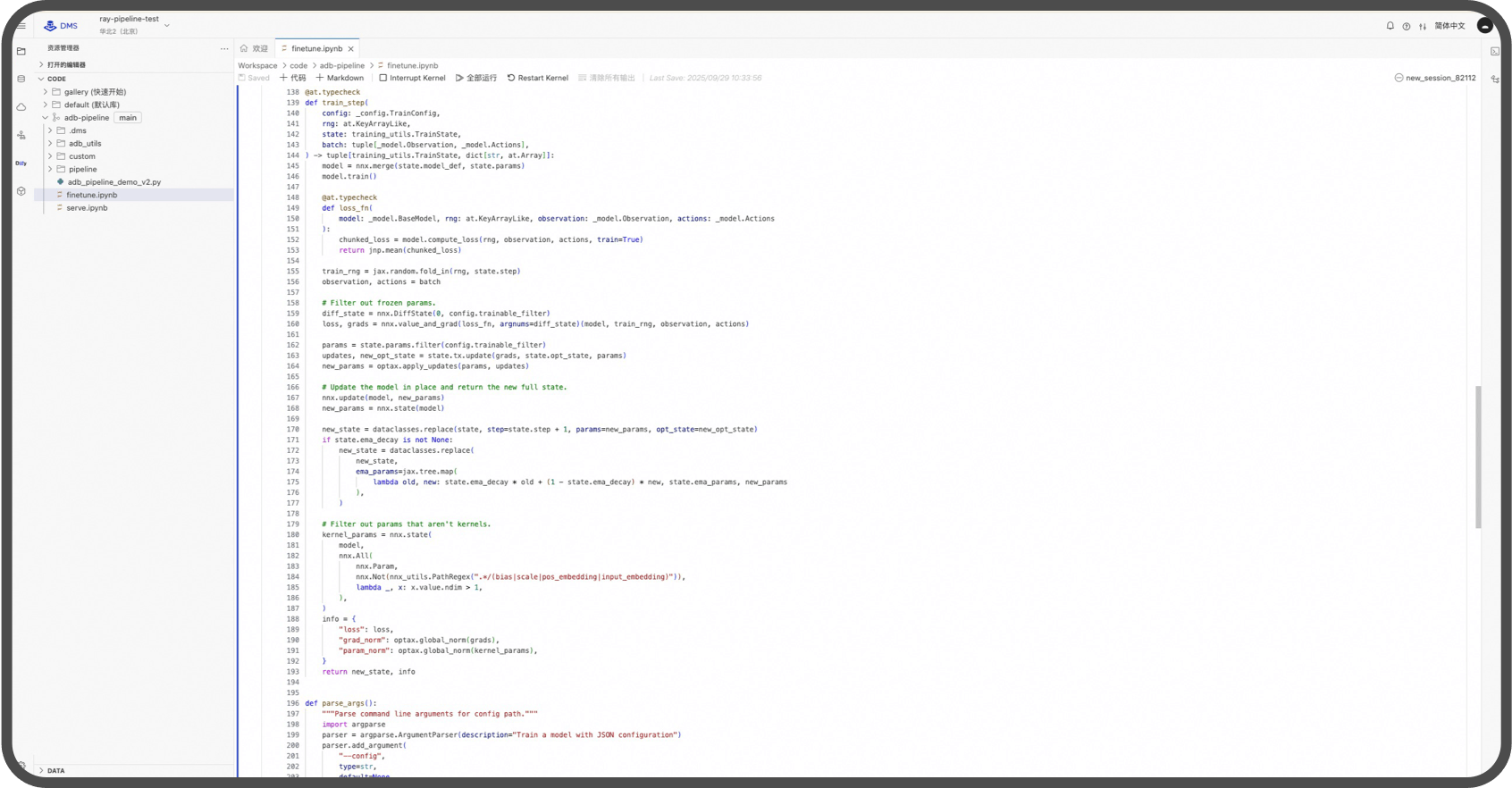
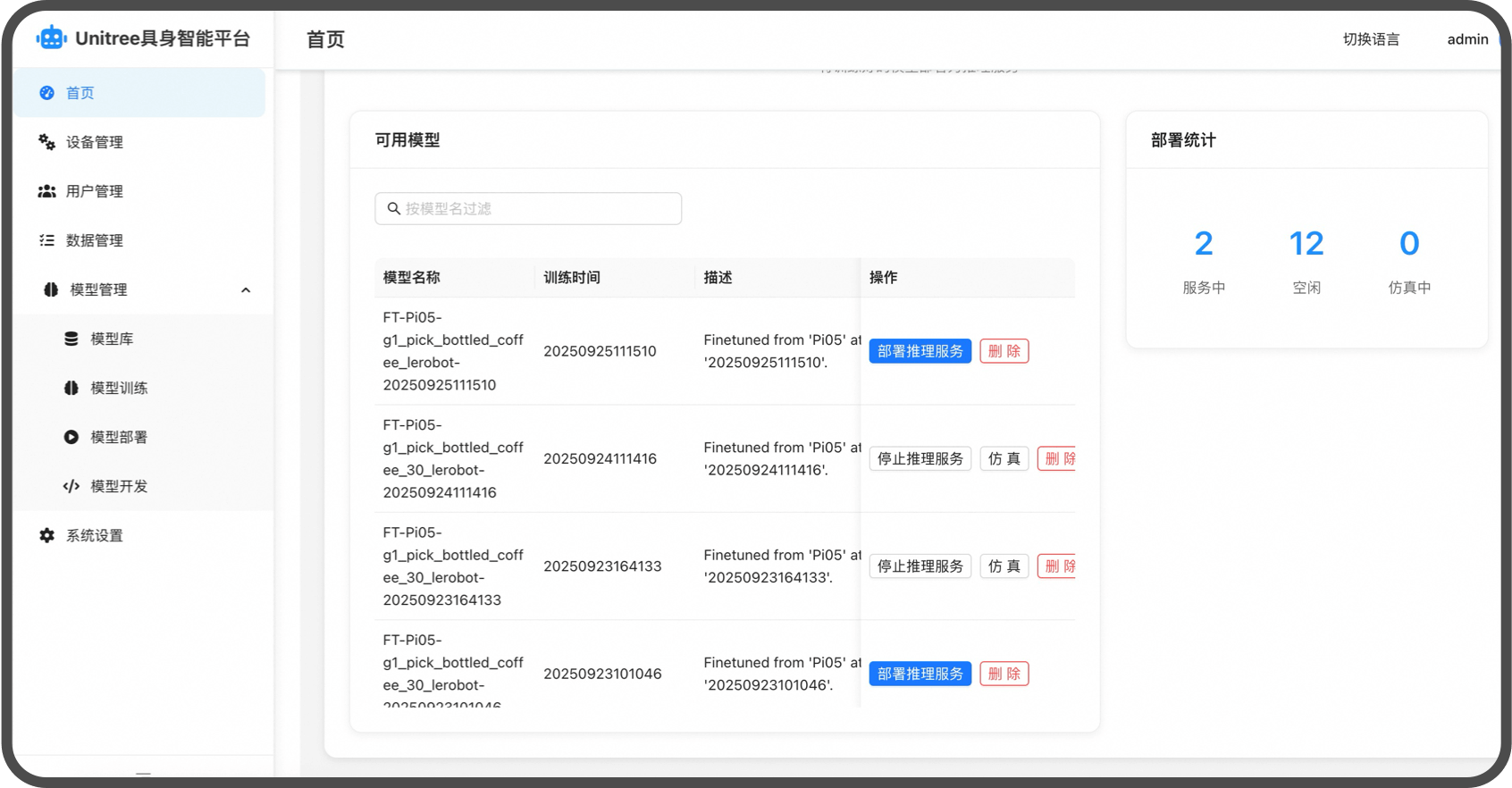
全面的模型训练及推理工具
支持从数据处理到模型训练、仿真测评及一键部署的工作流,平台无缝集成多种主流的机器人开源模型框架,让开发者能在一个统一的平台上,高效完成整个研发与部署流程。
1
模型架构选择

服务

生活

商业

工业
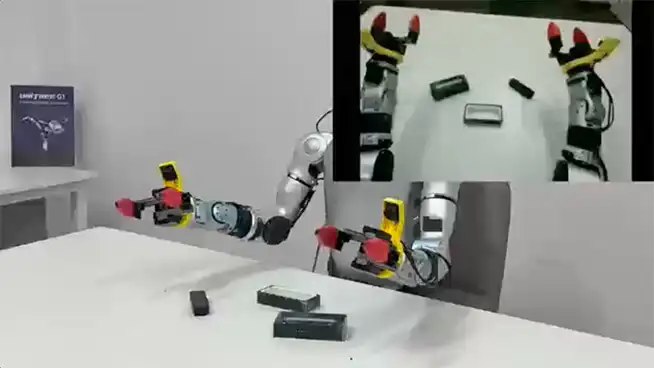
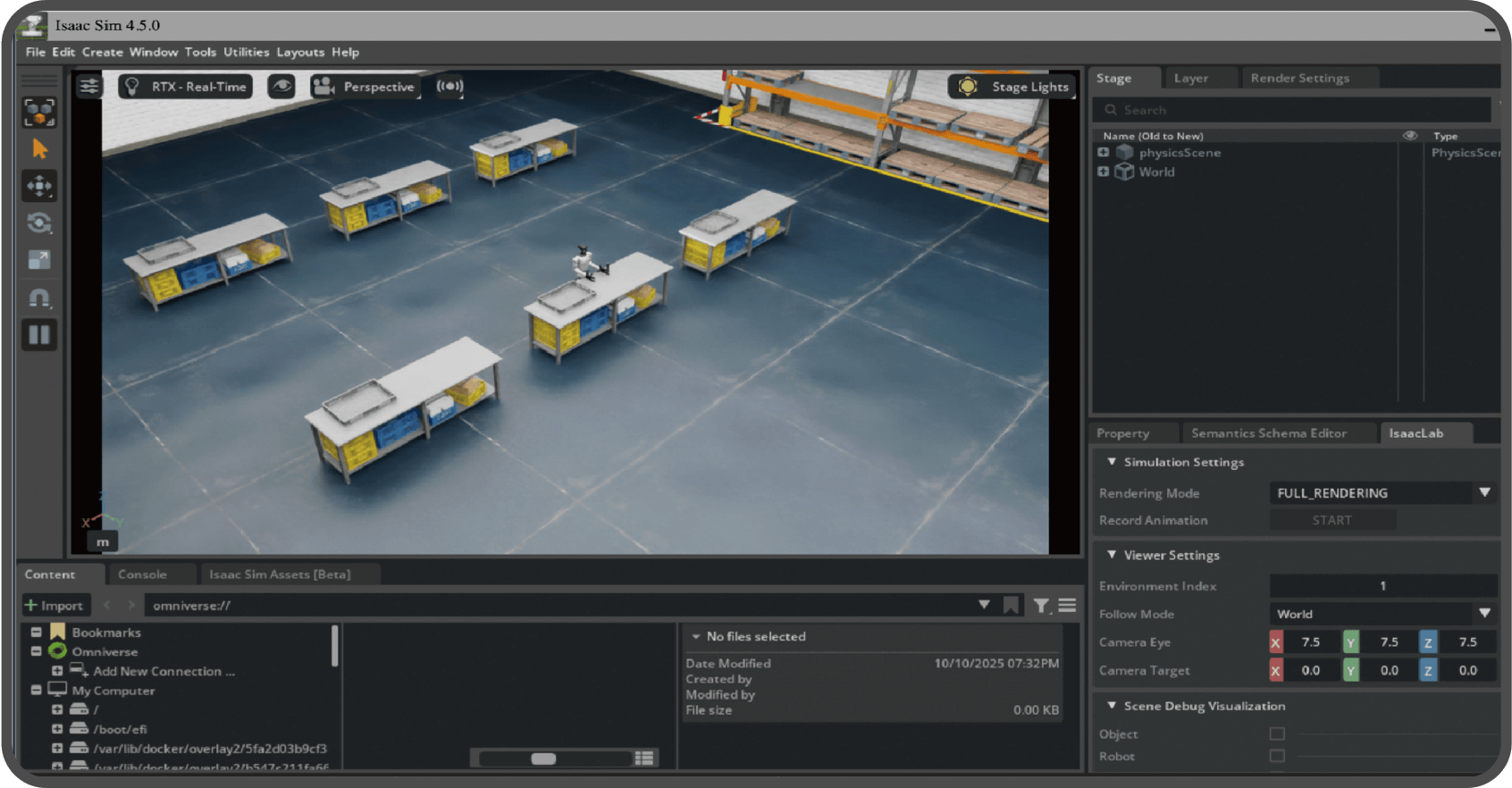
仿真模式:高保真反馈支撑数据生成
通过分析当前环境状态与任务目标,精准预测机器人与环境未来的物理交互信息。预测信息将直接辅助策略模块生成动作,有效降低决策失误率,优化动作执行的准确性与合理性。
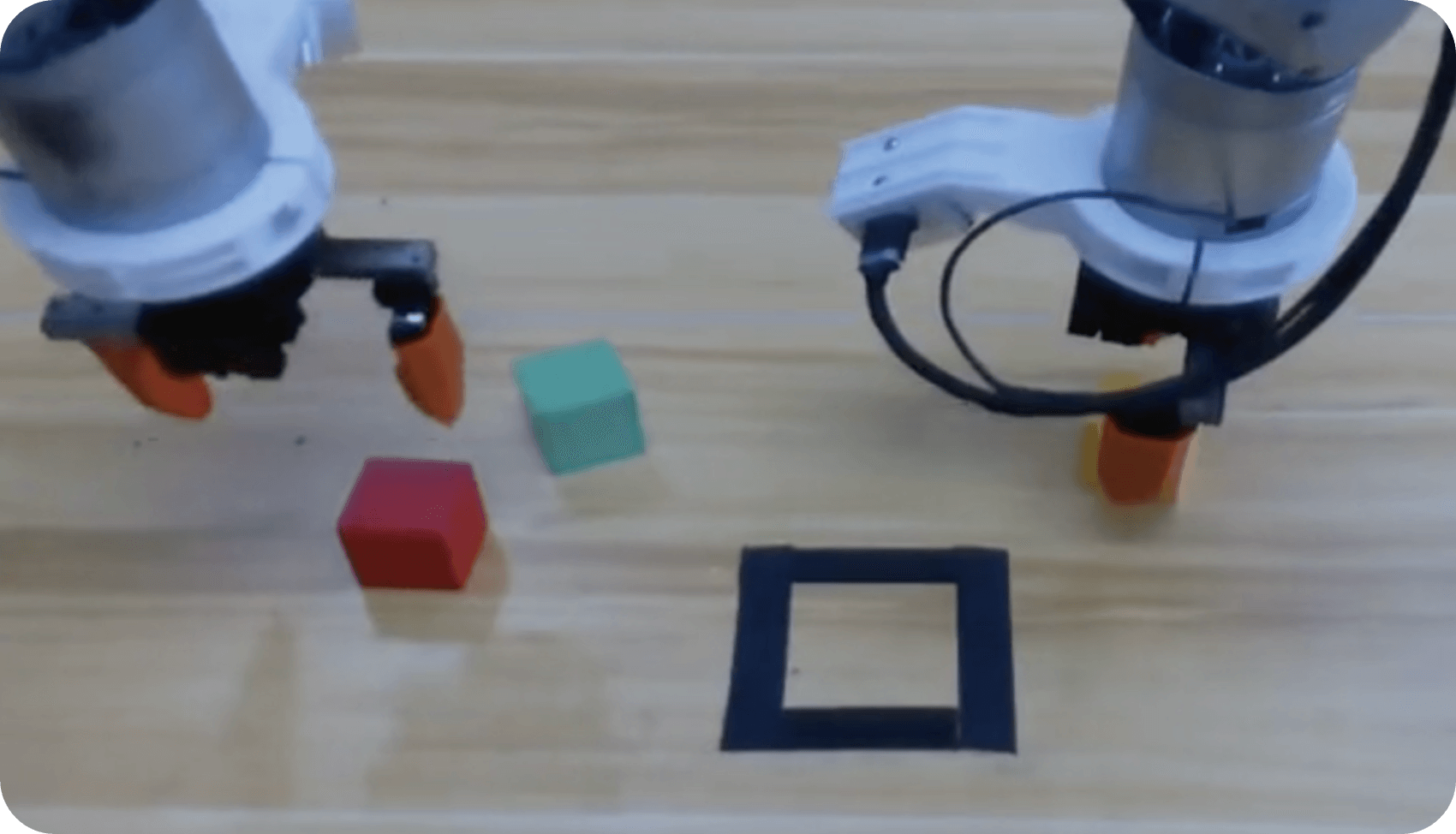
仿真模式:高保真反馈支撑数据生成
作为交互式仿真器运行,能够基于机器人的动作输入生成高保真的环境反馈。通过生成高质量合成数据,为机器人的模型训练与策略优化提供丰富的数据源支撑,大幅提升学习效率。
产品参数

型号
G1-D通用版
G1-D旗舰版
整机尺寸(立柱最低高度)
约1260x500x500mm
约1260x525x570mm
整机尺寸(立柱最高高度)
约1680x500x500mm
约1680x525x570mm
整机重量(含电池)
约50kg
约80kg
整机自由度(不含末端)
17
19
单臂自由度(不含末端)
7
7
单臂最大负载【1】
约3kg
约3kg
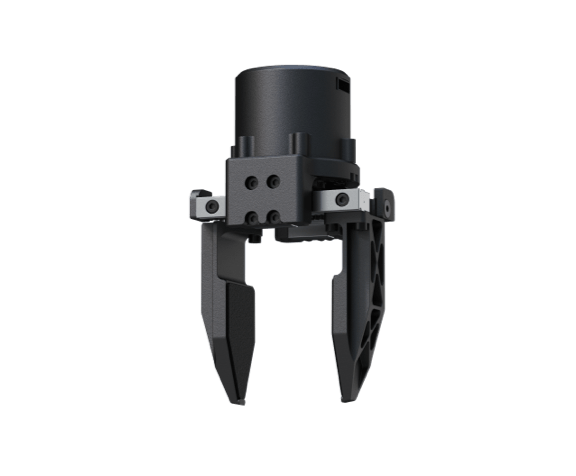
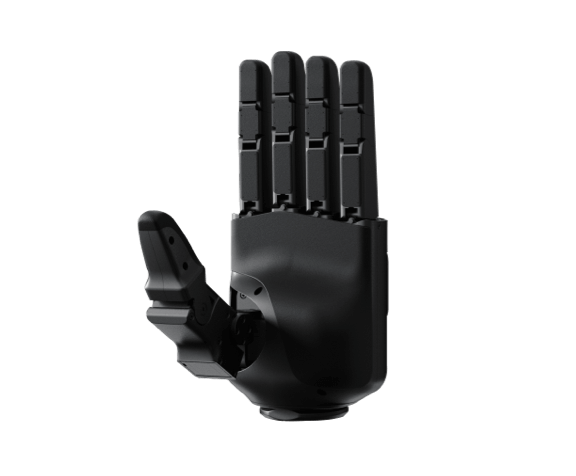
末端配置【2】
可选二指夹爪/三指灵巧手(无触觉)/
三指灵巧手(有触觉)/五指灵巧手
可选二指夹爪/三指灵巧手(无触觉)/
三指灵巧手(有触觉)/五指灵巧手
腰部自由度
2
2
腰关节运动空间
Z±155°、Y -2.5°~+135°
Z±155°、Y -2.5°~+135°
立柱升降速度
约60mm/s
约60mm/s
底盘移动速度
/
1.5m/s
底盘驱动形式
/
双轮差速,支持原地360°旋转
传感器
/
底盘激光雷达*1 + 底盘深度摄像头*2
+ 底盘物理碰撞传感器*2
+ 底盘低矮障碍物识别传感器*2
基础算力
8核高性能CPU
8核高性能CPU
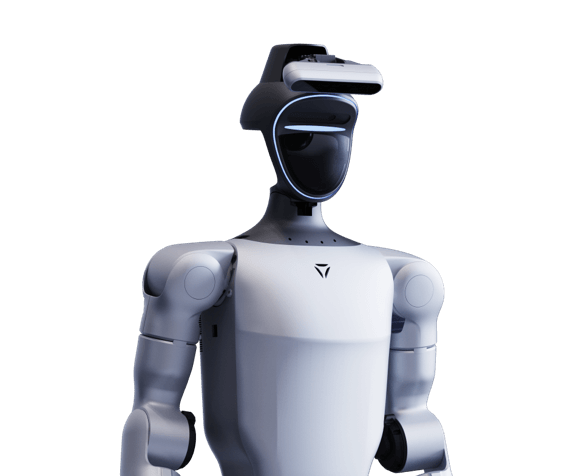
感知传感器
头部高清双目相机*1 + 腕部高清相机*2
头部高清双目相机*1 + 腕部高清相机*2
WiFi6、蓝牙5.2
有
有
高算力模组
多品牌多型号可选
Orin NX 16GB(100TOPS算力)等
多品牌多型号可选
Orin NX 16GB(100TOPS算力)等
电池
上身电池(快拆): 9Ah
底盘电池(内置):30Ah
手持式遥控器
有
有
可视化电脑
有
有
续航时间
约2小时
约6小时
智能OTA升级
有
有
二次开发【3】
有
有
[1]
手臂最大负载,不同手臂伸展姿态下,差异很大
[2]
末端配置请联系销售选型
[3]
详细功能,请查看二次开发手册
[4]
更详细保修条款,请参见产品保修手册
[5]
以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准
[6]
人形机器人结构复杂,动力极其强劲,请用户让人和机器人保持足够的安全距离,请务必小心使用
[7]
产品外观后续可能会有升级调整,请以届时实物为准
[8]
本页面有些示例功能,还在开发测试完善,后续陆续开放给用户
本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
请访问宇树科技官网了解更多产品相关条款与政策,请遵守各地区法律法规。