机器人
行业应用
服务与支持
关于宇树
APP 下载

























Unitree
无刷数字舵机
小巧紧凑 为具身智能应用而生
- 无刷电机
- 强大动力
- 高度集成化
- 精密减速器
- 温度、位置传感器
- 高速通信
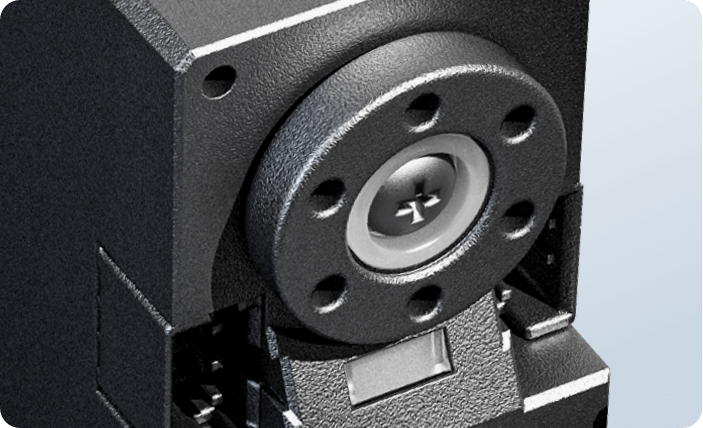
YS-342026系列数字舵机为一款模块化的驱动器,由齿轮减速器、无刷高速电机、控制板封装组成;
电机与减速器高度集成,体积小巧紧凑,内置温度传感器,支持多种操作模式;
标配无刷高速电机,动力强劲寿命更长,精度与响应速度显著提升;
J288款是S288款的升级版,从工程塑料齿轮与工程塑料外壳升级为金属齿轮与铝合金外壳,从而增强了散热效果、舵机寿命以及耐冲击强度;
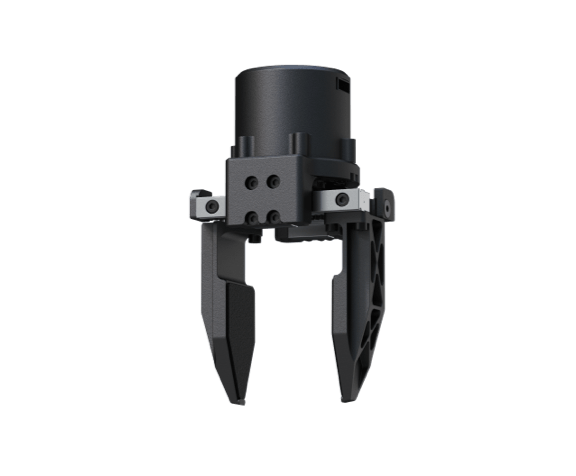
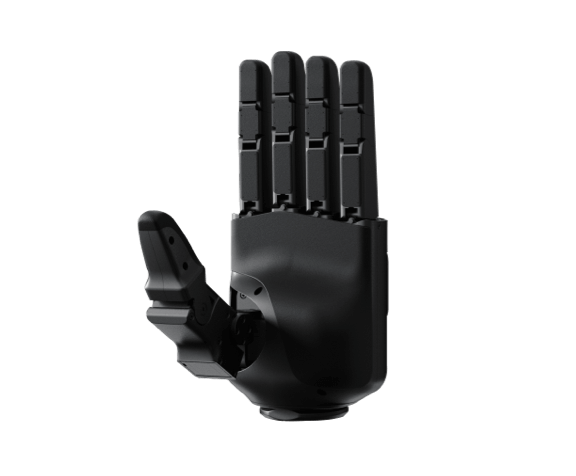
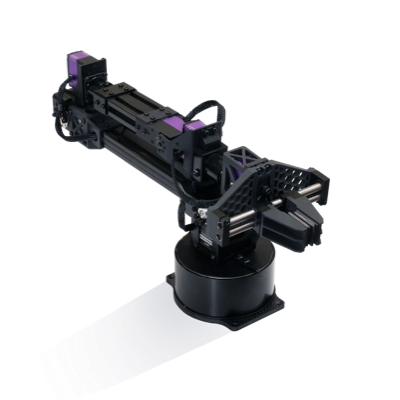
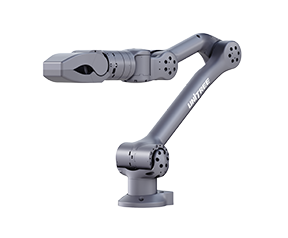
可广泛应用于机械臂、灵巧手等各类机器人关节、动力部件;
机器人大赛、DIY创作、科研教育、机器人领域等的首选;

DIY 创作
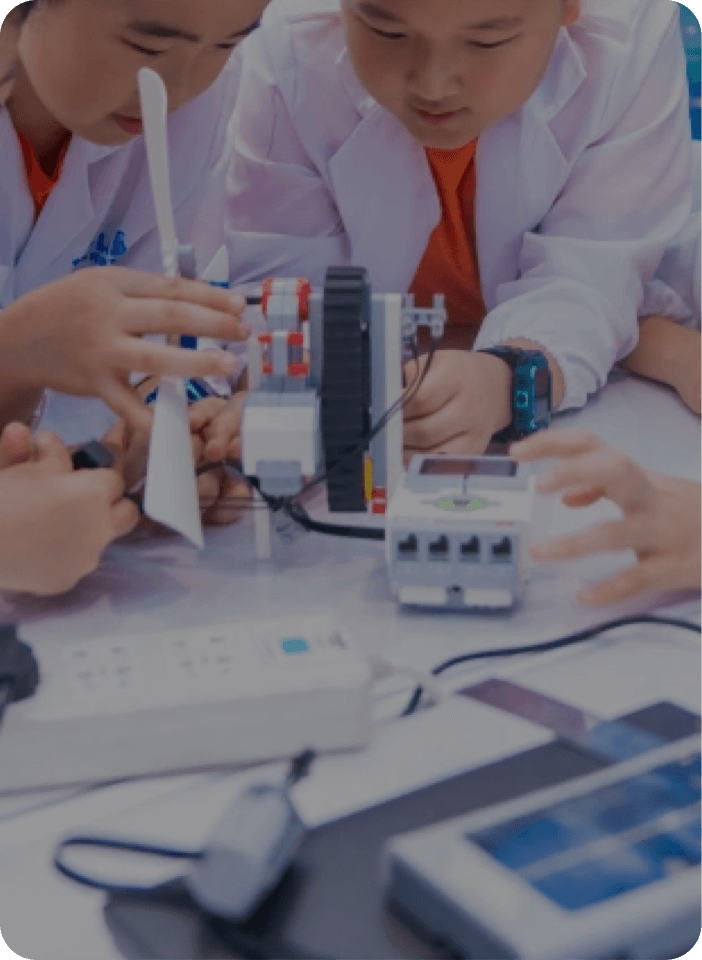
科研教育

运动关节

机器人大赛
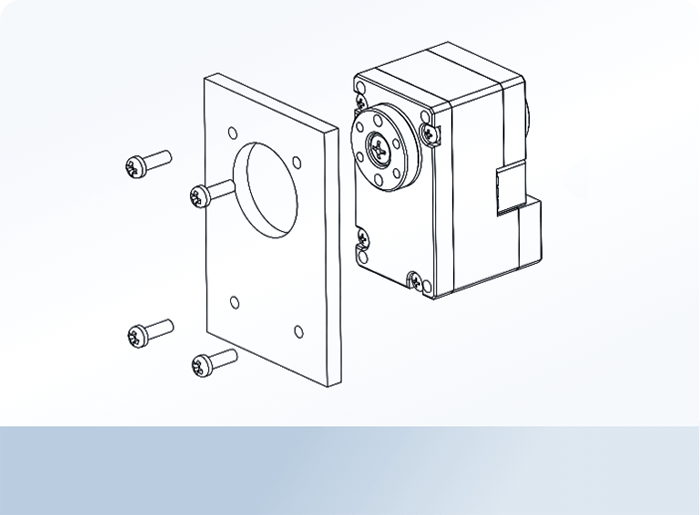
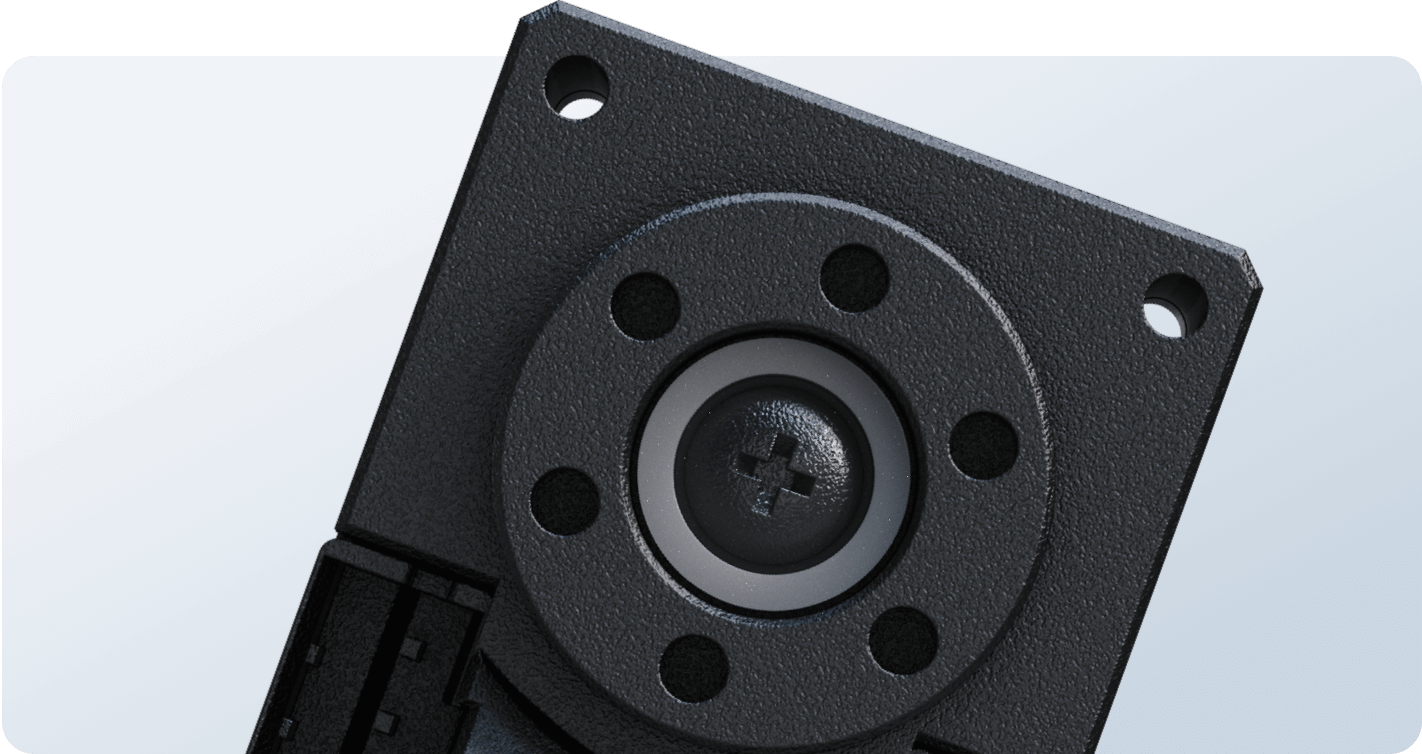
正面固定示意
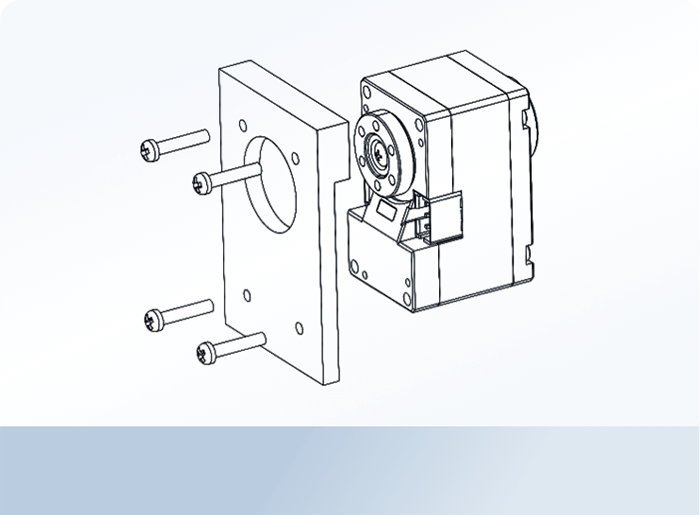
背面固定示意
- YS-342026-S288
- YS-342026-J288
输入电压
Min.
6.4V
推荐
12.6V
Max.
12.6V
性能特点
电压
12.6V
空载电流
0.27A@12V
最大线电流
0.32A
最大(空载)转速
16.5rad/s
扭矩常数
0.554Nm/A
最大(堵转)扭矩
扭矩与转速方向相同:0.07Nm
扭矩与转速方向相反:0.2Nm
工作温度
Min.
-20℃
Max.
驱动板超过90度停机并报过热错误
绕组超过120度停机并报过热错误
其他
位置传感器
转子、输出端,双绝对值编码器
电机
无刷电机
波特率
6,000,000bps
控制算法
混合控制
齿轮类型
直齿
齿轮材料
工程塑料
外壳材料
工程塑料
尺寸 (W x H x D)
20 x 34 x 26mm
重量
19.5g
齿轮比
288.35:1
指令信号
数字数据包
转子端编码器分辨率
15bit
协议类型
半双工异步串行通信
(8bit, 1stop, No Parity)
链接 (物理)
TTL 电平多点总线
ID
0-14
电机感知反馈
转子力矩、转子角度、输出端角度、
转子角速度、温度、电压、错误状态
协议版本
Unitree自定义协议
操作模式 / 角度
混合模式:转子力矩、转子角度、
转子角速度、转子刚度、转子阻尼
待机电流
0.05A@12V
本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
请访问宇树科技官网了解更多产品相关条款与政策,请遵守各地区法律法规。