Can built on Isaac™ GR00T
Comes with open models, simulation frameworks, and validated reference workflows from data to deployment
Jetson™ T5000
Onboard Compute
Featuring FP4 2,070 TFLOPS
Full Connectivity
Supports Ethernet, Wi‑Fi 6, Bluetooth 5.2, and USB connections.
Equipped with array microphones and speakers for voice interaction.
Whole-Body Control
Maximum Arm Torque:
120 N/m
Maximum Leg Torque:
360 N/m
Battery for Extended Endurance
15Ah, 0.972 kWh capacity with approximately 3 hours of battery life.
Multi-View Sensing
Equipped with a head-mounted
stereo camera with
wide field of view,
wrist cameras and an IMU
High Payload Capacity
Rated arm payload of 7 kilograms
and peak payload of 15 kilograms,
enabling high-duty grasping and
reaching tasks.
Remote
Emergency Stop
Enables rapid and safe
robot shutdown remotely.
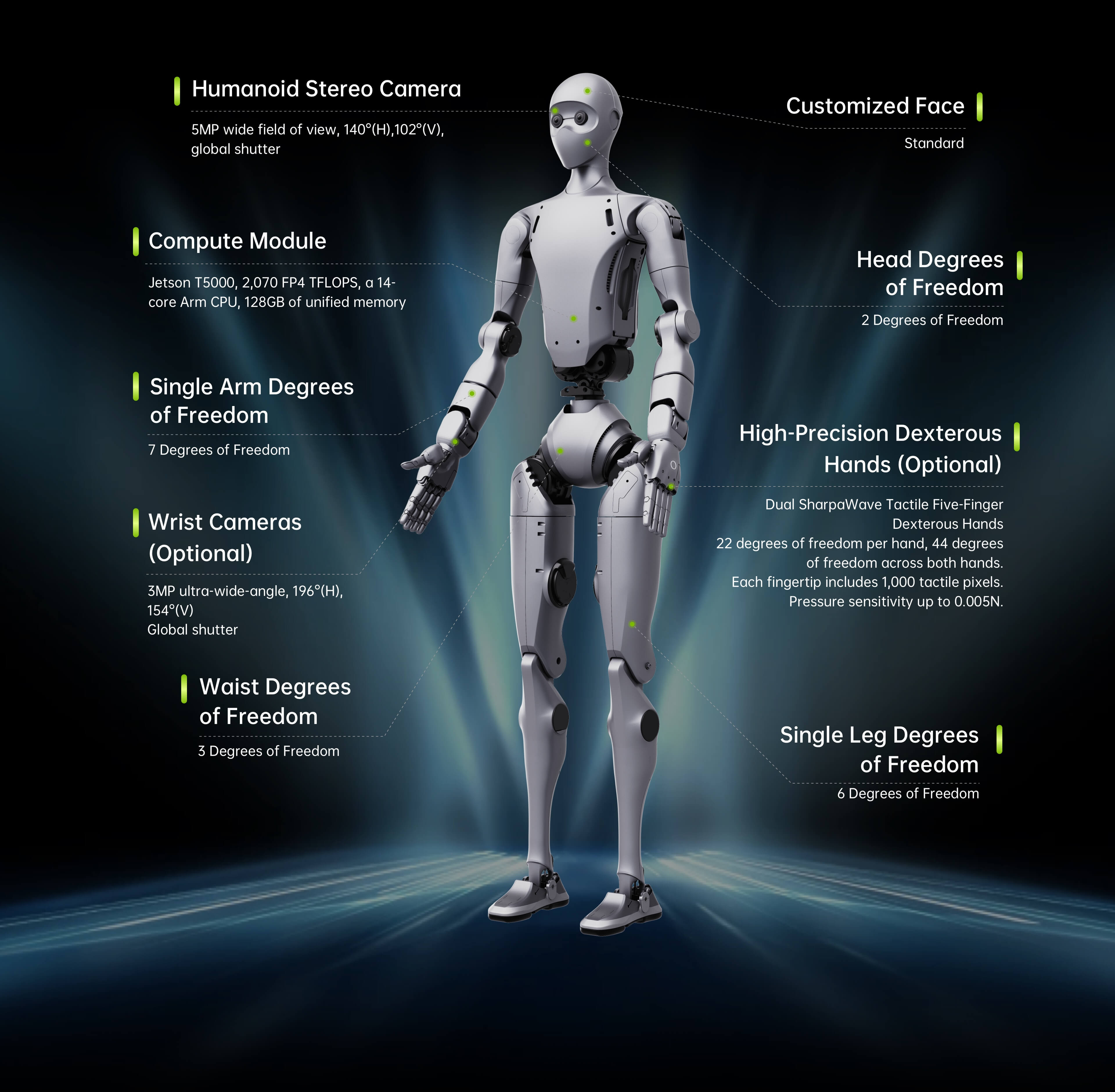
Dual SharpaWave Tactile
Five-Finger Dexterous Hands
22 active DOF in the hands
and 75 total body-and-hand DOF
for advanced dexterous manipulation.

Can built on Isaac™ GR00T
Comes with open models, simulation frameworks, and validated reference workflows from data to deployment

Jetson Thor™, Ultra-Powerful Onboard Compute
Equipped with an Blackwell GPU with 2,070 FP4 TFLOPS, a 14-core Arm CPU, 128GB of unified memory and a configurable 40W–130W power range for real-time sensor processing and robot inference.

Isaac TeleOp
Captures high-quality robot demonstration data for training and policy development.
Isaac GR00T Open Foundation Models
Supports humanoid reasoning, learning and multitask behavior.

Isaac Sim™ and Isaac Lab™
Simulates, trains, tests and evaluates robot policies before real-world deployment.

Accelerated Isaac™ ROS Middleware
Moves trained policies onto robots.

Jetson Thor
Runs real-time, on board inference and control.
Height × Width × Depth (Standing)
1820 x 456 x 218mm
Weight with Battery
About 70kg
Degrees of Freedom (Number of Joint Motors)
31
Single Leg Degrees of Freedom
6
Single Arm Degrees of Freedom
7
Waist Degrees of Freedom
3
Head Degrees of Freedom
2
Joint Output Bearings
Industrial-grade crossed roller bearings (high precision, high load capacity)
Joint Motors
Low-inertia high-speed inner-rotor permanent magnet synchronous motors (better response speed and heat dissipation)
Maximum Arm Joint Peak Torque [1]
120N.m
Maximum Leg Joint Peak Torque [1]
360N.m
Maximum Arm Payload [1]
Peak: approx. 15kg; Rated: approx. 7kg
Lower Leg + Upper Leg Length
1045mm
Forearm + Upper Arm Length
690mm
Main Body Materials
Aerospace-grade aluminum + titanium alloy + high-strength engineering plastics
Cooling System
Air Cooling
Power Supply Method
Low-Resistance High-Quality Lithium Battery
Battery Voltage
Maximum Voltage: 75.6V
Base Computing Power
PC1: Intel Core i5 (Platform Functions)
PC2: Intel Core i7 (User Development)
Perception Sensors
Wide-FOV Humanoid Binocular Camera
External Interfaces
USB3.0 x 3
USB+DP x 3
GMSL x 4
Gigabit Ethernet x 4
USB2.0 x 2
RS485 x 4
CAN x 2
Power Outputs:12V x 1;24V x 2;BAT x 1
Voice Interaction
Voice interaction via array microphones and high-power speakers
WiFi 6 、Bluetooth 5.2
YES
High-Performance Computing Module
NV Jetson™ T5000
Smart Battery(Quick Release)
YES
Charger
YES
Handheld Remote Controller
YES
AI Performance
2070 TFLOPS (FP4—sparse)
GPU
2560-core NV Blackwell Architecture GPU
with 5th-Generation Tensor Cores
Multi-Instance GPU with 10 TPCs
GPU Max Frequency
1.57 GHz
CPU
14-core Arm® Neoverse®-V3AE 64-bit CPU
1 MB L2 cache per core
16 MB shared system L3 cache
CPU Max Frequency
2.6 GHz
Vision Accelerator
1x PVA v3
Memory
128 GB 256-bit LPDDR5X
273 GB/s
Storage
Supports NVMe through PCle
Supports SSD through USB3.2
Video Encode
2x NVENC
Video Decode
2x NVDEC
Head Binocular Camera
Horizontal FOV 140°±3;
Vertical FOV 102°±3; Aperture 2.0;
Focal Length 2.67mm;
Depth of Field 0.4m-INF;
global shutter;
Wrist Cameras (Optional)
3MP ultra-wide-angle, HFOV 196°, VFOV 154°,Global shutter
Dexterous Hand Weight
1.3KG
Dexterous Hand Dimensions
208 x 90 x 50mm
Active Degrees of Freedom per Dexterous Hand
22
Dexterous Hand Payload
30Kg
Dexterous Hand Grip Force
150N
Dexterous Hand Fingertip Force
20N
Dexterous Hand Operating Speed
>4Hz
Fingertip Positional Repeatabillity
±1mm
Number of Dexterous Hand Tactile Pixels
>1000 tactile pixels per fingertip
Dexterous Hand Force Detection Range
Range 0–30N, Sensitivity 0.005N
Battery Life
About 3h
Smart OTA Upgrade
YES
Secondary Development [2]
YES
Warranty Period [3]
12 Months
[1]
The above parameters may vary in different scenarios and configurations, please subject to actual situation.
[2]
For more information, please read the secondary development manual.
[3]
For more detailed warranty terms, please read the product warranty brochure.
[4]
The humanoid robot has a complex structure and extremely powerful power. Users are asked to keep a sufficient safe distance between the humanoid robot and people. Please use with caution
[5]
The product appearance is subject to change. Please refer to the final product.
[6]
Some sample functions on this page are still being developed and tested, and will be opened to users in the future.
[7]
Currently, the global humanoid robot industry is in the early stages of exploration. Individual users are strongly advised to thoroughly understand the limitations of humanoid robots before making a purchase.
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.