- Size
φ 65*60
Diameter × Length (mm)
- Maximum Torque
34.4 Nm
The Toque Is In The Opposite Direction of The Rotational Speed
- Weight
535g
Tiny body. Titanic force.

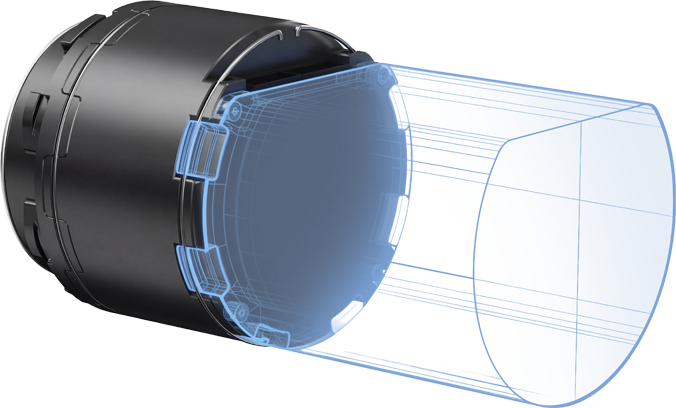
High-Precision Bearing
High Precision, High Load Capacity, Long Life
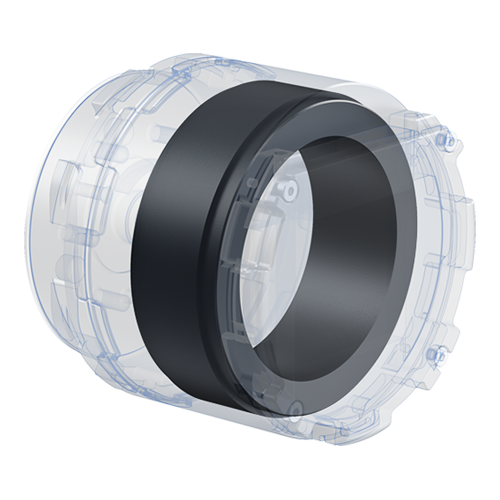
PART 1

Dual Encoder Control
Motor-side Encoder Output-side Encoder
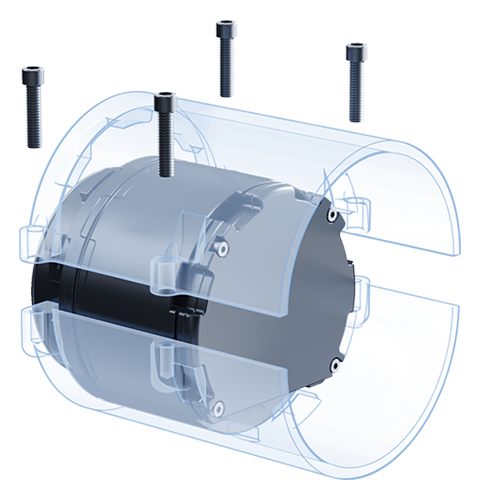
PART 2

Quick Installation
Quick disassembly and assembly under low load
PART 3
Clamp Mounting
Small package, massive torque. Built for high-performance robotic joints.
Top choice for competitions, DIY, research & education, and robotics.
PART 4
Power like a flood
Cooling like the wind
New Stator Manufacturing Process
Ultra-high energy density — 1.5x torque density of standard motors.
Powerful heat dissipation — extended peak torque duration.
PART 5
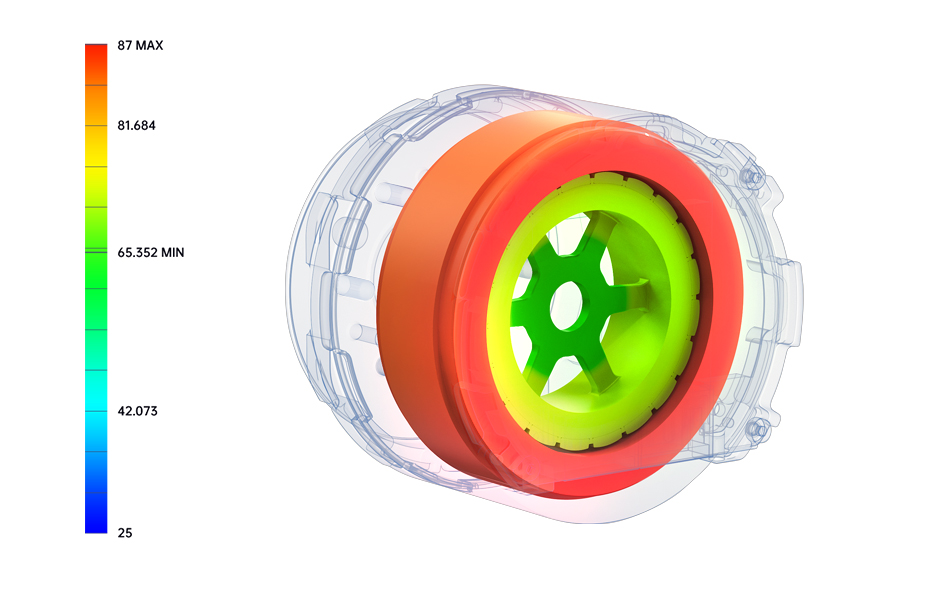
Temperature under control. Precision above all.
During high-speed forward/reverse switching, our self-developed thermal management model monitors real-time temperature 400 times per second — squeezing every last ounce of torque from the motor.
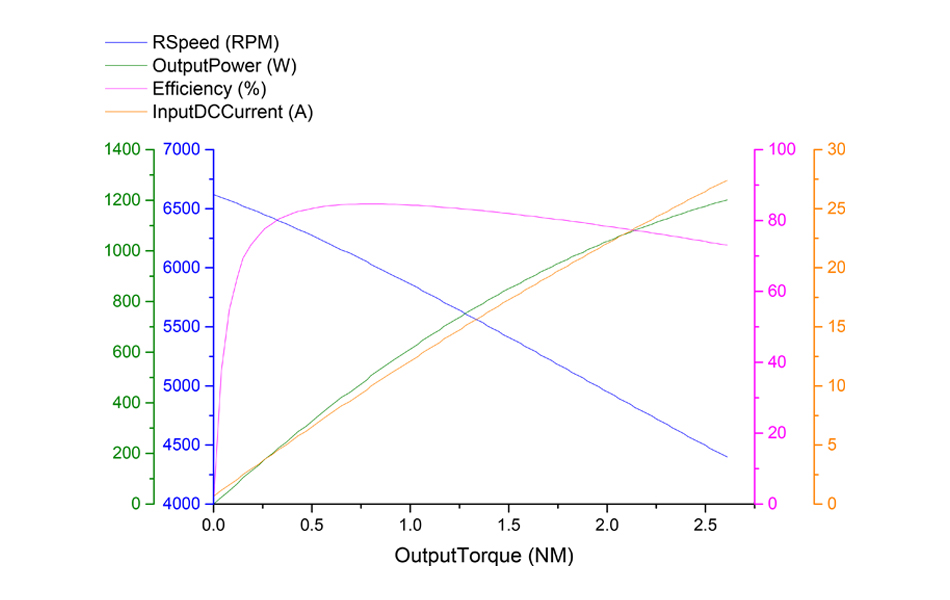
FOC Control Curve Graph
25°C ambient, 60V, 12.66 gear ratio — 31.7 Nm peak torque, 54.2 rad/s.

Quadruped robot

Humanoid robot

Small Robotic Arm
Performance Characteristics
Model
N6014B-12.6
Weight
535g
Dimensions (W x H x D)
φ65*60mm
Maximum (No-Load) Speed
54.2 rad/s(60v)
Input Voltage
24v~75v
Gear Ratio
3:38
Maximum Line Current
40A
Maximum Torque
The Toque Is In The Opposite Direction of The Rotational Speed:
34.4N.m
Maximum Torque
The Torque Is In The Same Direction As The Speed:
31.7N.m
Temperature
Min
-20℃
Max
The driver board shuts down and reports an overheat error when exceeding 90 degrees
The winding shuts down and reports an overheat error when exceeding 130 degrees
Other
Baud Rate
6000000bps/4000000bps
Control Algorithm
Hybrid Control
Gear Material
Metal
Shell Material
Aluminum alloy + high-strength engineering plastic
Rotor End Encoder Resolution
15bit
Protocol Type
High Speed RS-485 Communication
(8bit, 1stop, No Parity)
Connection (Physical)
RS-485 Multidrop Bus
ID
0-14
Position Sensor
Rotor, output end, dual absolute value encoder
Command Signal
Motor ID, Operating Mode, Timeout Protection, Feedforward Torque, Target Velocity, Target Position, Position Stiffness, Velocity Stiffness
Motor Feedback
Torque, Angle, Angular velocity, Temperature, Voltage, Error status, Fault status
Motor Control
Torque, Angle, Angular Velocity, Feedforward Torque, Position Stiffness, Velocity Stiffness
Warranty
3 month
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.