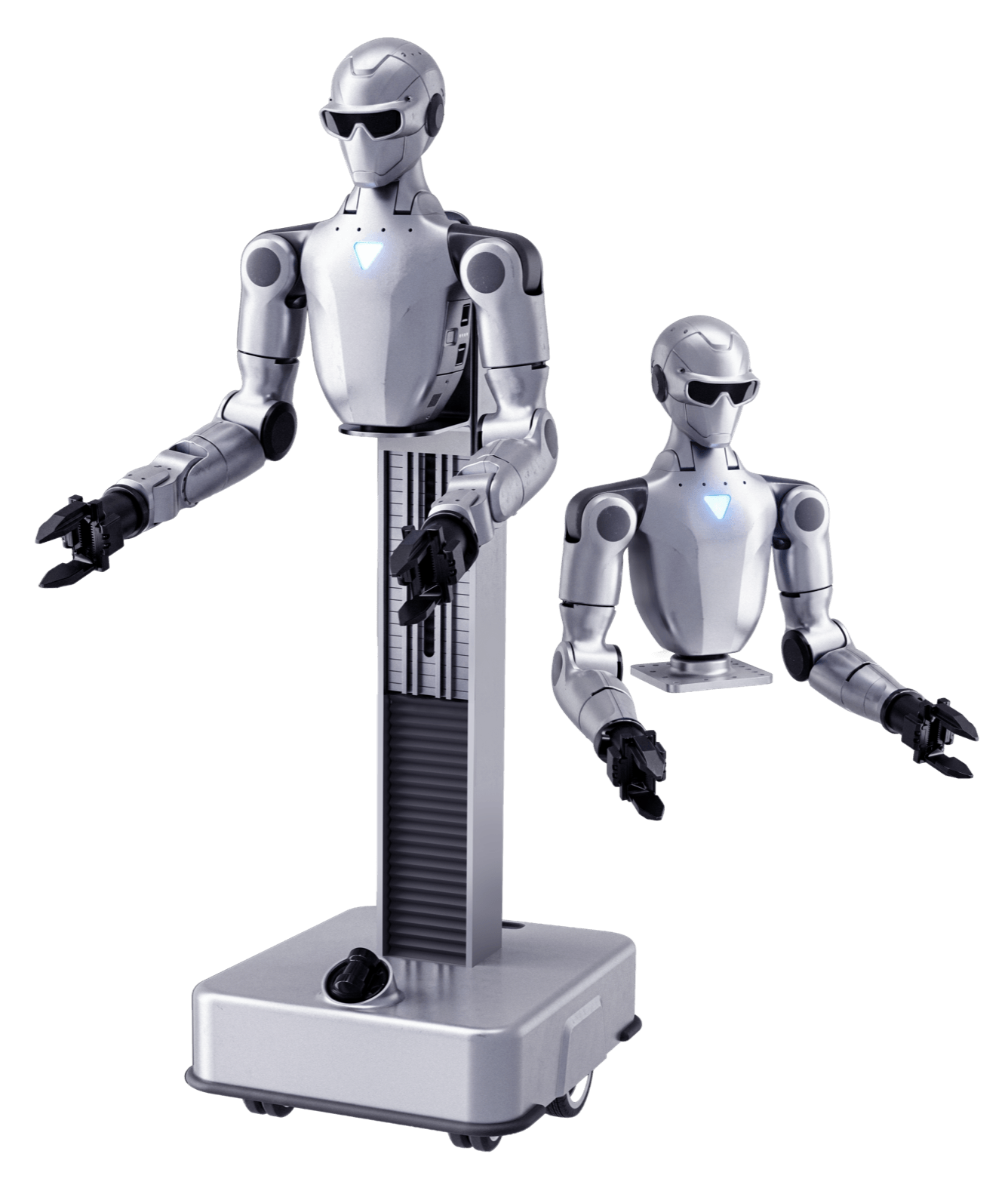
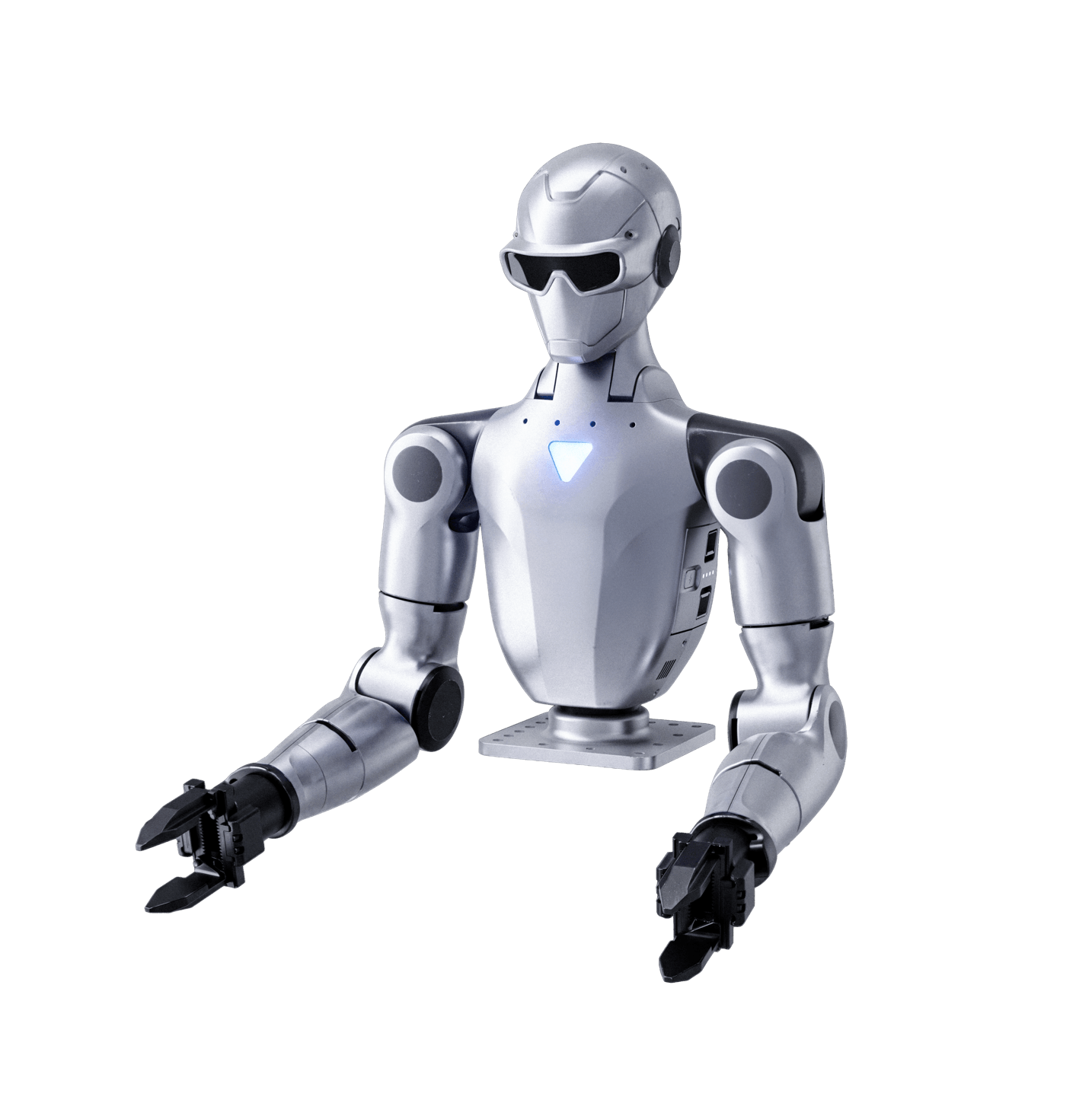
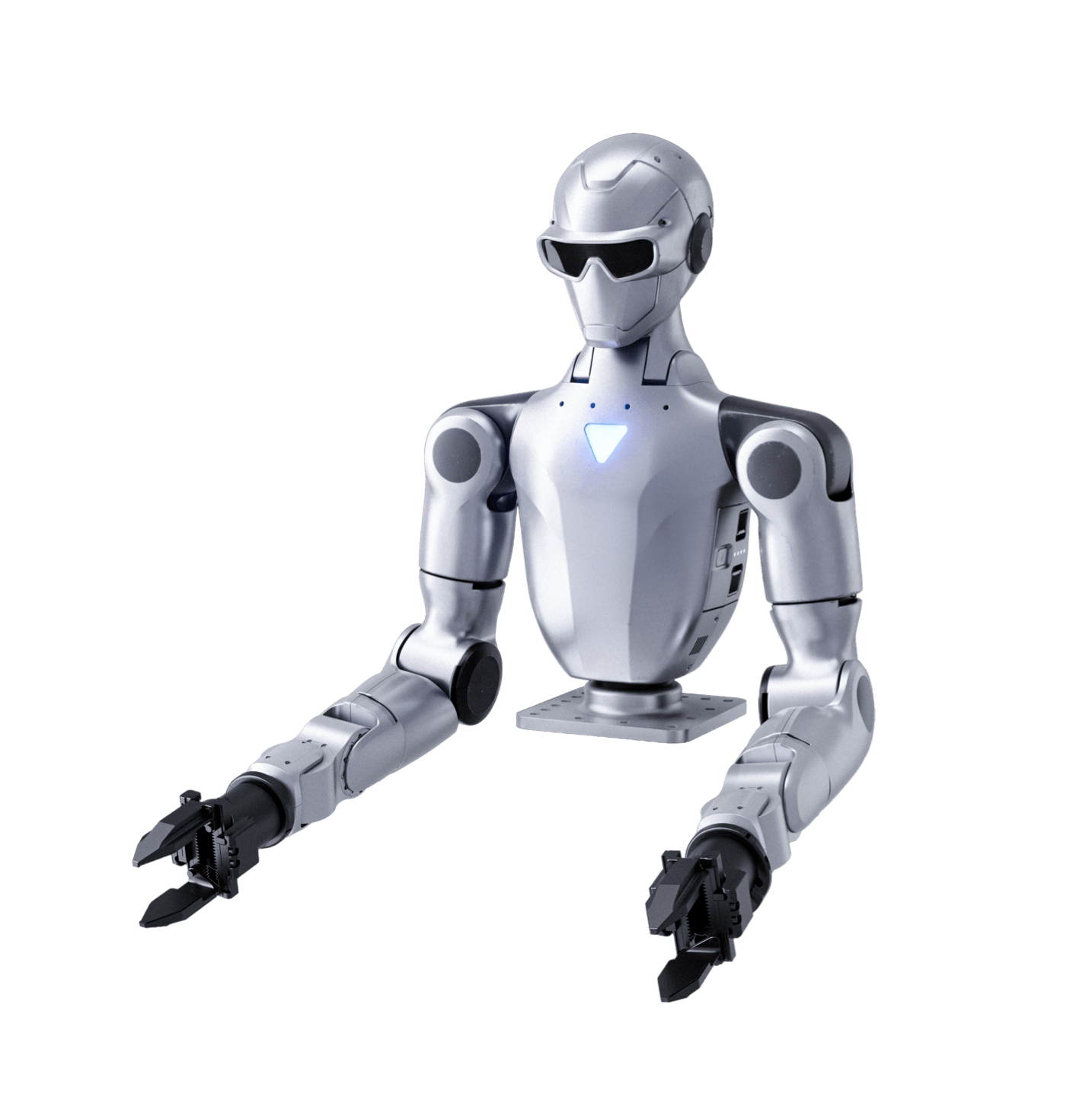
Unitree Dual-Arm Humanoid Robot
Ultra-fast deployment, multi-scenario application
Price from $ 4,290
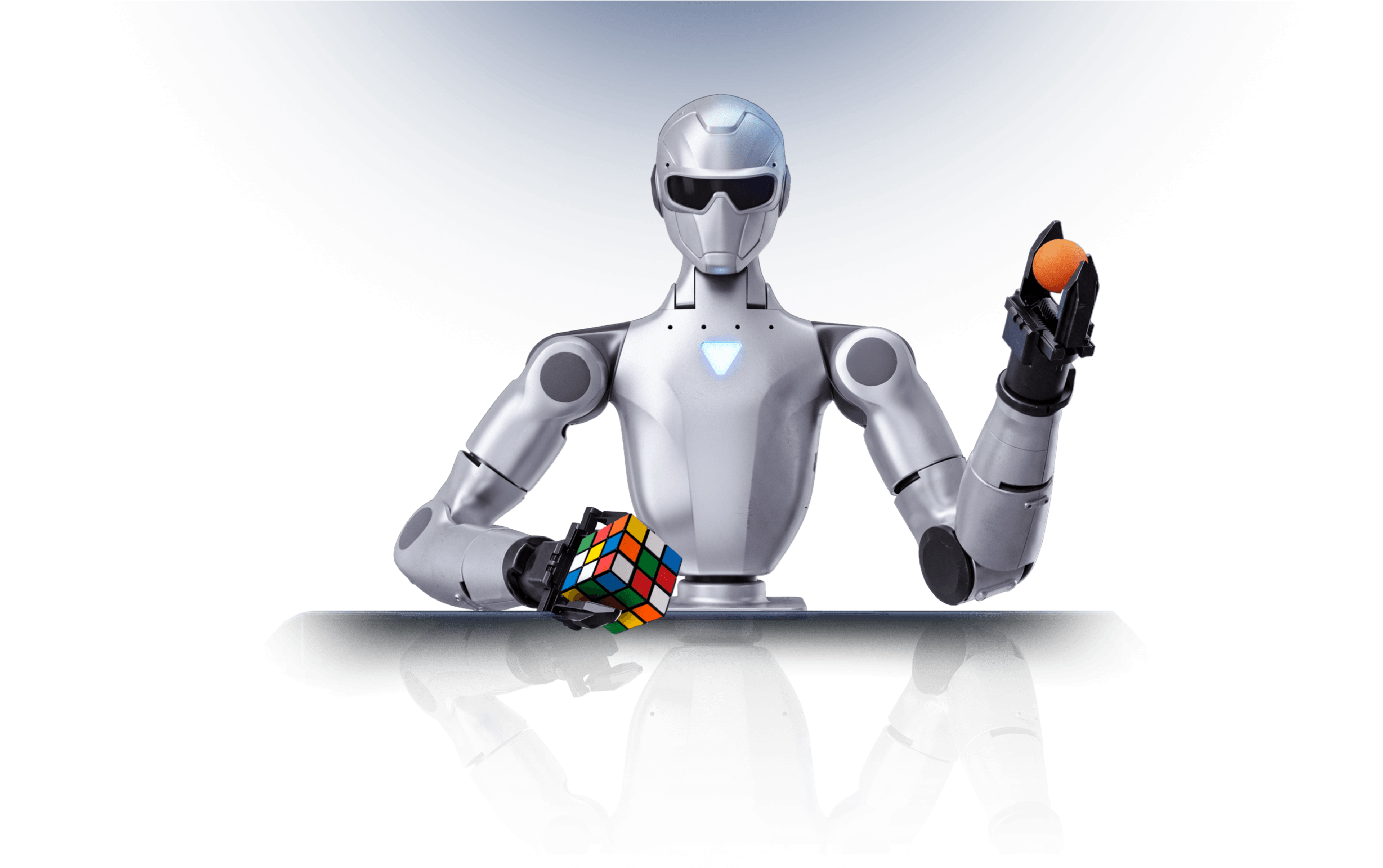
 High-performance dual-arm robot
High-performance dual-arm robotHigh-performance motors, reducers, encoders and various robot sensors
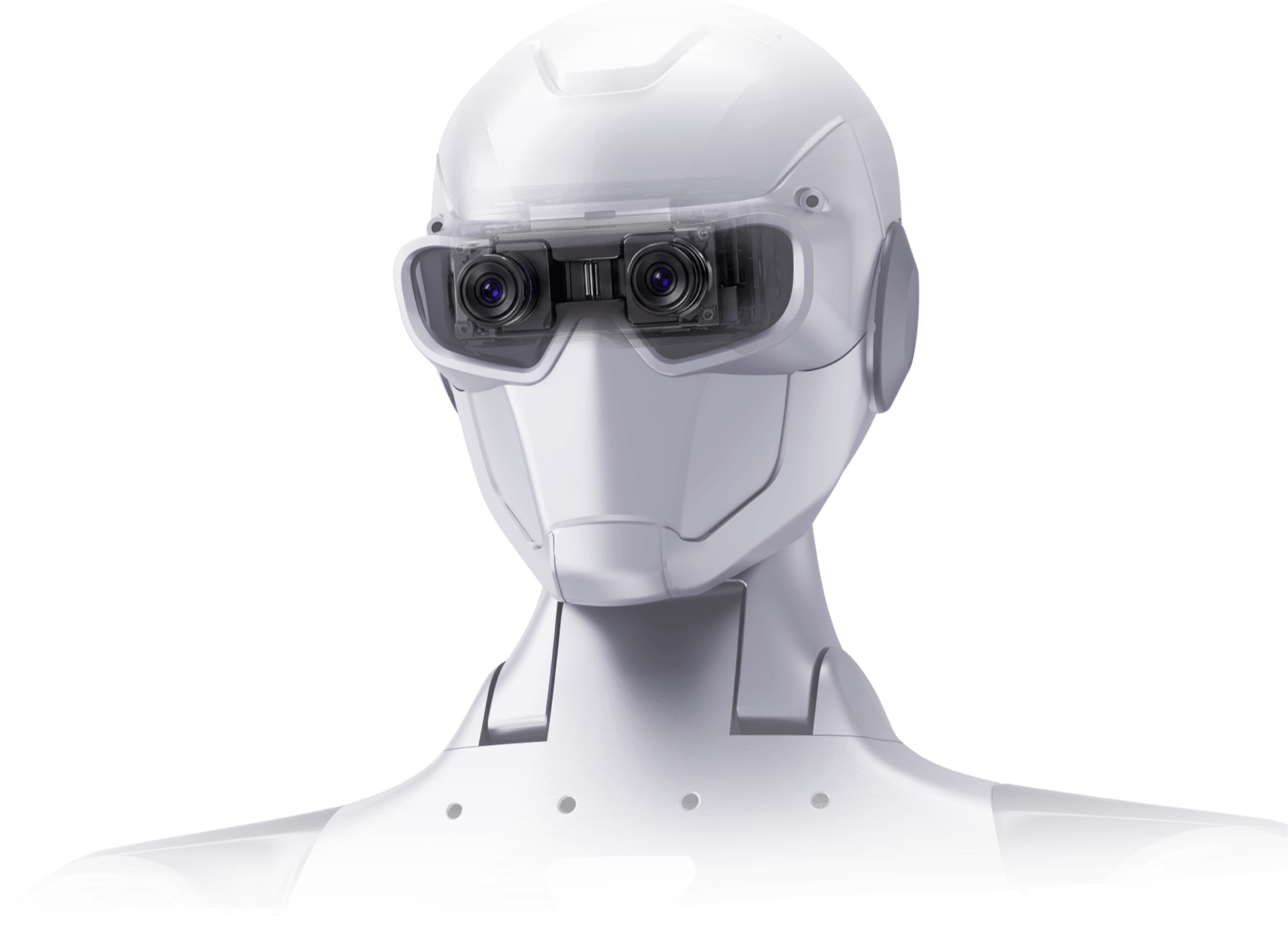
 More diverse interaction methods
More diverse interaction methodsConfigure visual dual-camera computing modules and voice interaction system
 Full-stack open secondary development
Full-stack open secondary developmentA mature robot development framework that supports full-process secondary development at the underlying level
A dual-arm robot with higher degrees of freedom

15~31
Total degrees of freedom
5x2/7x2
Arm degrees of freedom
1
Waist degrees of freedom
2
Head degrees of freedom
1~7 x2
End degree of freedom
A wider working space

Lumbar joint movement space
Yaw ± 150°
Cervical joint movement space
Yaw ± 115°, Pitch ± 36°
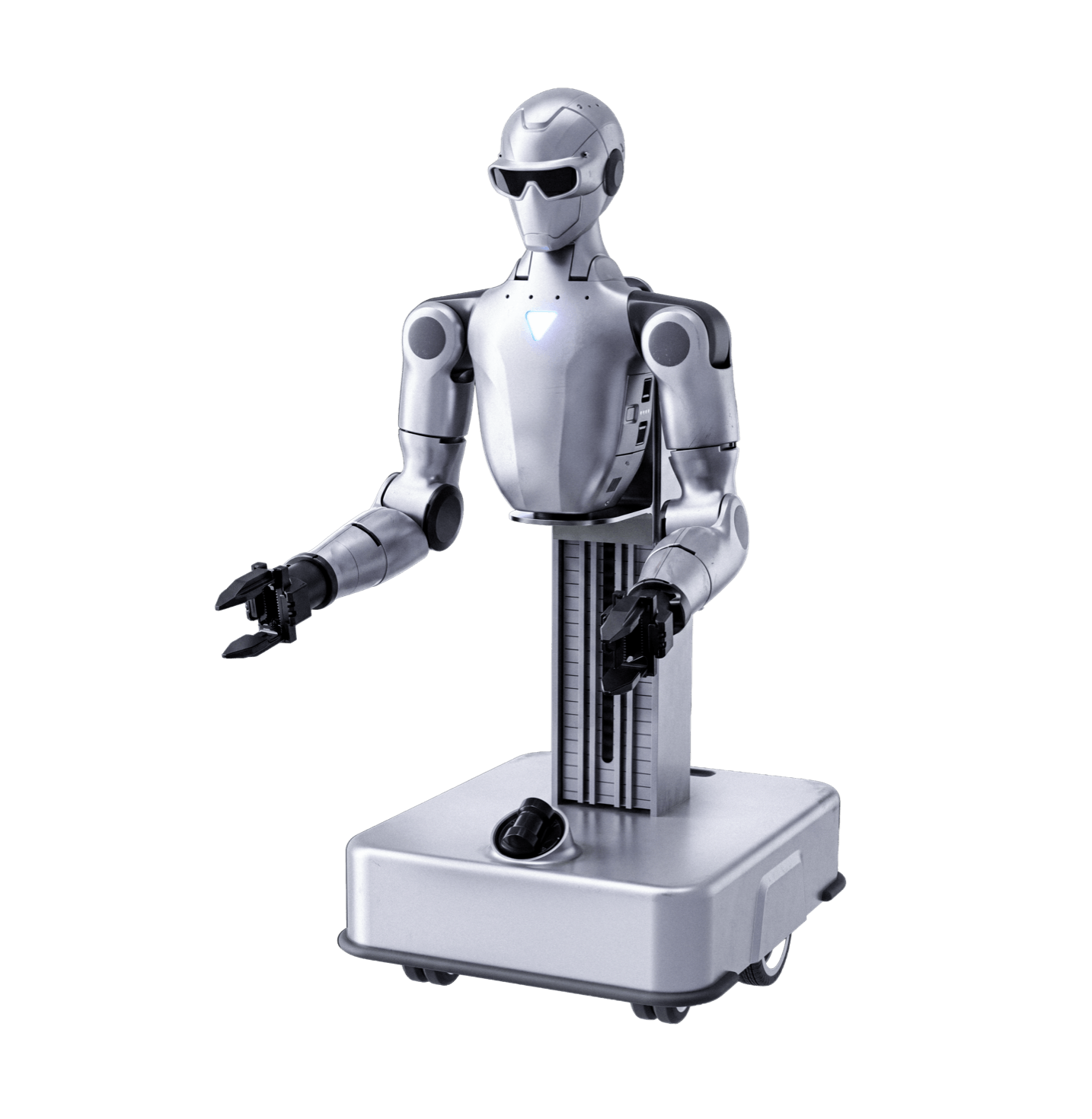
Supports two mounting types:
Fixed base / Mobile base
Compatible with two robotic arms:
5-DOF / 7-DOF (single arm)
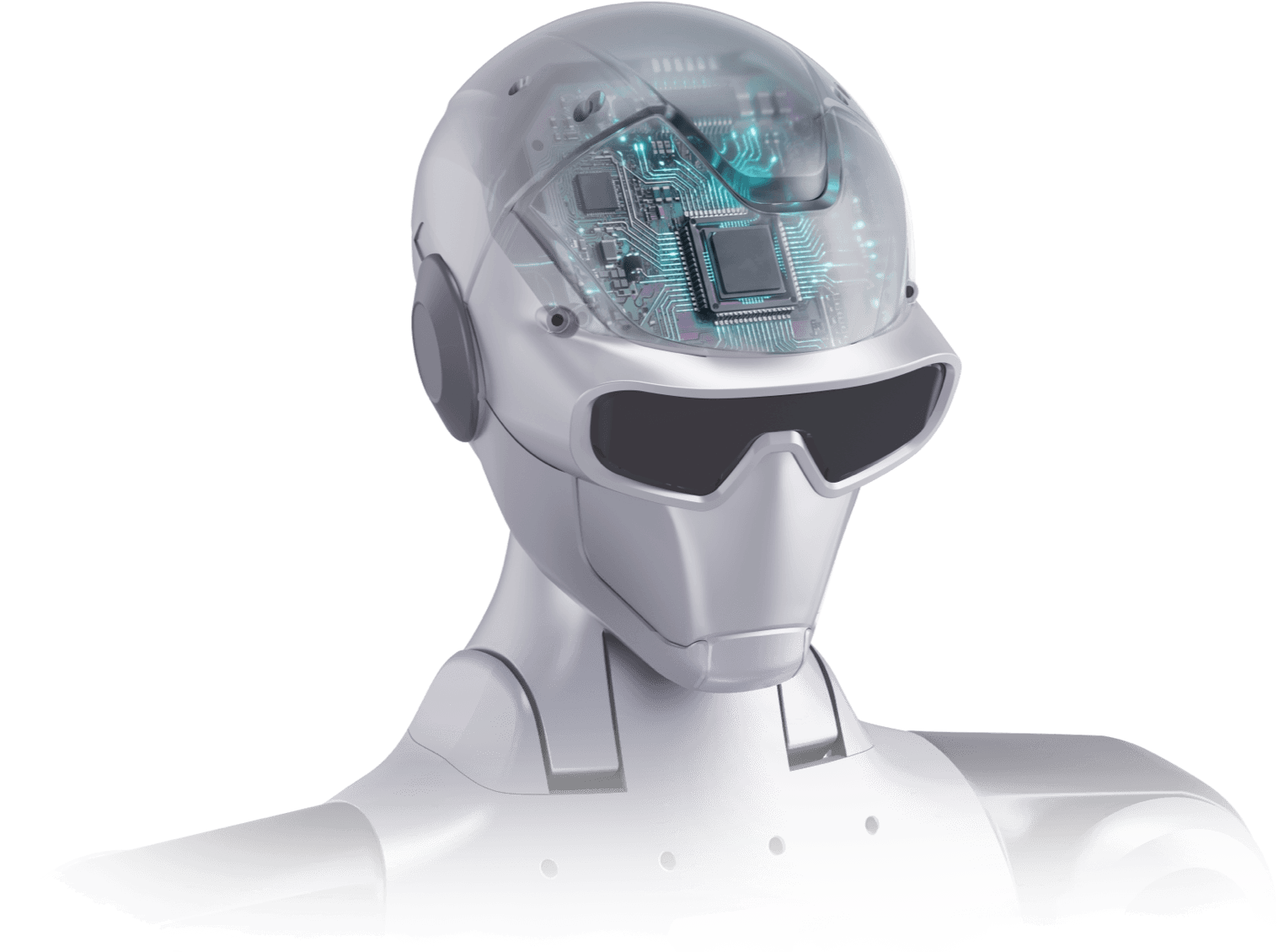 High-performance computing module,offering outstanding computing powerHead processor: 8-core high-performance CPUHead module computing power: 10 TOPSBody processor: 8-core high-performance CPU
High-performance computing module,offering outstanding computing powerHead processor: 8-core high-performance CPUHead module computing power: 10 TOPSBody processor: 8-core high-performance CPU- Provide RGB and depth map interfaces for the binocular moduleBinocular FOV: Horizontal 146°, Vertical 124°Eye spacing: 60mmRGB:1280×720@30Hz544×448@10Hz
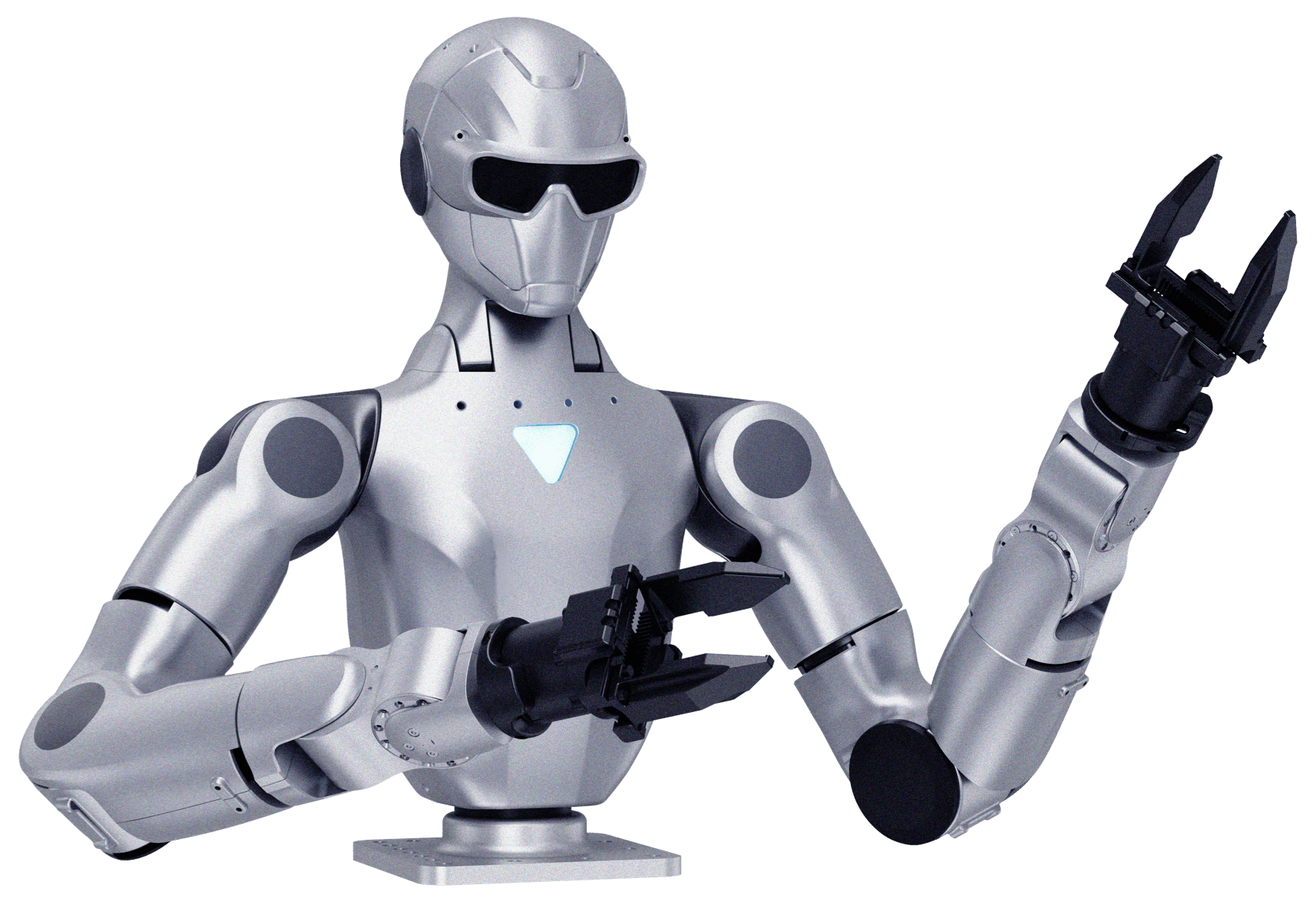 Open program interfaces and end interfaces
Open program interfaces and end interfacesOpen interfaces for the underlying system, robotic arm, audio, lighting, visual control, etc., supporting drag-and-drop teaching
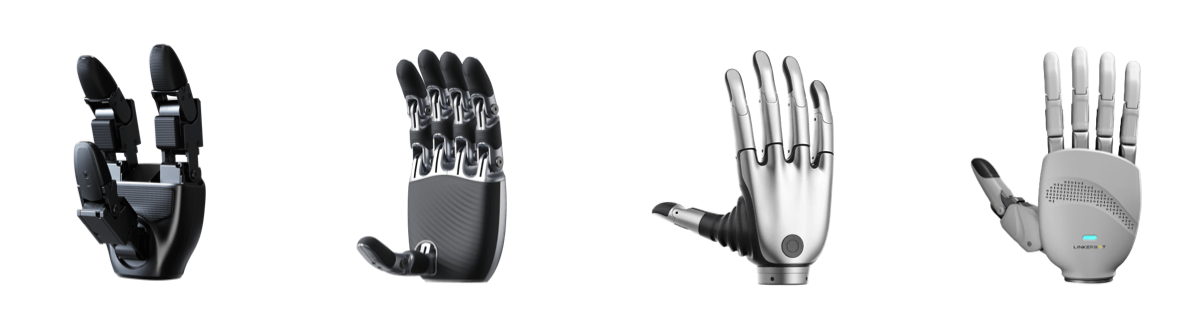
- The end can be quickly equipped with different actuators

Application scenarios



R1-A5
R1-A7
R1-A5-D
R1-A7-D
- Voice collaboration
4-array microphone + dual speakers
- Visual collaboration
Dual-eye computing module
- Maximum arm load capacity
2~4KG[1]
- End-clamp accuracy
±0.1mm
Mechanical Dimensions
Model
R1-A5
R1-A7
R1-A5-D
R1-A7-D
Dimensions
700x357x190mm
835x357x190mm
Shrunk size: 683x520x440mm
Raised size: 1600x520x440mm
Shrunk size: 683x520x440mm
Raised size: 1600x520x440mm
Weight
Approx. 11kg(with external power supply)
Approx. 13kg(with external power supply)
Approx. 30kg
Approx. 32kg
Degrees of Freedom (with Gripper)
15
19
18
22
DOF per Arm
5
7
5
7
Waist DOF
1
1
1
1
Head DOF
2
2
2
2
Chassis DOF
/
/
3
3
Joint Output Bearing
Crossed Roller + Deep Groove Ball
Crossed Roller + Deep Groove Ball
Crossed Roller + Deep Groove Ball
Crossed Roller + Deep Groove Ball
Joint Motor
Low-Inertia High-Speed Inner Rotor PMSM (Superior Responsiveness & Heat Dissipation)
Low-Inertia High-Speed Inner Rotor PMSM (Superior Responsiveness & Heat Dissipation)
Low-Inertia High-Speed Inner Rotor PMSM (Superior Responsiveness & Heat Dissipation)
Low-Inertia High-Speed Inner Rotor PMSM (Superior Responsiveness & Heat Dissipation)
Maximum torque of the shoulder
60Nm
60Nm
60Nm
60Nm
Max Arm Payload [1]
2~4kg
2~4kg
2~4kg
2~4kg
End Effector [2]
Optional two-finger gripper / three-finger dexterous hand / five-finger dexterous hand
Optional two-finger gripper / three-finger dexterous hand / five-finger dexterous hand
Optional two-finger gripper / three-finger dexterous hand / five-finger dexterous hand
Optional two-finger gripper / three-finger dexterous hand / five-finger dexterous hand
Forearm + Upper Arm Length
420mm
555mm
420mm
555mm
Joint Motion Range
Waist: Yaw±150°
Head: Yaw±115° Pitch±36°
Waist: Yaw±150°
Head: Yaw±115° Pitch±36°
Waist: Yaw±150°
Head: Yaw±115° Pitch±36°
Waist: Yaw±150°
Head: Yaw±115° Pitch±36°
Electrical Characteristics
Wiring
Hollow + Internal Wiring
Hollow + Internal Wiring
Hollow + Internal Wiring
Hollow + Internal Wiring
Joint Encoder
Dual encoder (arm)
Dual encoder (arm)
Dual encoder (arm)
Dual encoder (arm)
Cooling System
Local Air Cooling
Local Air Cooling
Local Air Cooling
Local Air Cooling
Power Supply
External Power or Li-ion Battery
External Power or Li-ion Battery
External Power or Li-ion Battery
External Power or Li-ion Battery
Base Computing Power
Body: 8-core high-performance CPU
Head: 8-core high-performance CPU + 10 TOPS
Body: 8-core high-performance CPU
Head: 8-core high-performance CPU + 10 TOPS
Body: 8-core high-performance CPU
Head: 8-core high-performance CPU + 10 TOPS
Body: 8-core high-performance CPU
Head: 8-core high-performance CPU + 10 TOPS
Microphone
4-Array
4-Array
4-Array
4-Array
Speaker
Dual Speakers (3W×2)
Dual Speakers (3W×2)
Dual Speakers (3W×2)
Dual Speakers (3W×2)
WiFi 6 & Bluetooth 5.2
Yes
Yes
Yes
Yes
Camera Module
Binocular Camera + Optional Wrist Camera
Binocular Camera + Optional Wrist Camera
Chassis LiDAR + Binocular Camera + Optional Wrist Camera
Chassis LiDAR + Binocular Camera + Optional Wrist Camera
Accessories
High-Computing Module
Optional NVIDIA Jetson Orin (40-100 TOPS)
Optional NVIDIA Jetson Orin (40-100 TOPS)
Optional NVIDIA Jetson Orin (40-100 TOPS)
Optional NVIDIA Jetson Orin (40-100 TOPS)
Rear Power Input
Yes
Yes
Yes
Yes
Charger
Included
Included
Included
Included
Other
Battery Life(Battery-powered)
Approx. 1.5h
Approx. 1.5h
Approx. 1.5h
Approx. 1.5h
Smart OTA Update
Yes
Yes
Yes
Yes
Secondary Development [3]
Yes
Yes
Yes
Yes
Warranty period [4]
12 months
12 months
12 months
12 months
[1]
The maximum load of the arm varies greatly under different arm extension postures.
[2]
For end-effector selection, please contact our sales team.
[3]
For more information, please read the secondary development manual.
[4]
For more detailed warranty terms, please read the product warranty brochure.
[5]
The above parameters may vary in different scenarios and configurations, please subject to actual situation.
[6]
The dual-arm robot features a complex structure and extremely powerful power. Users must maintain a sufficient safety distance between humans and the robot. Use with extreme caution
[7]
The product appearance is subject to change. Please refer to the final product.
This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.