轻便,去哪带哪
 查看机器狗运动模拟 >
查看机器狗运动模拟 >Unitree Go1
全球首款消费级伴随仿生四足机器人
观看视频 →
重量
12
kg
长宽高[叠]
0.588 x 0.22 x 0.29
m
自适应负载能力
≈ 3-5
kg
轻便,去哪带哪
高动态
17km/h
ISS智能伴随
SSS超感知
10目探测
AI检测人体
识别等
柔韧自适应
关节
长续航
长待机
SSS超感知系统
超感知视角覆盖
1组鱼眼双目深度感知角度
≈ 150 x 170°
5组鱼眼双目深度感知
鱼眼AI感知
1组鱼眼双目深度感知
≈ 4组intel realsense的感知角度
故:5组鱼眼双目深度感知 ≈ 20组intel realsense的感知角度
鱼眼AI感知:人体识别等






ISS智能伴随系统
采用专利无线矢量定位及控制技术
优点
1、机器人位于人的侧向余光视线内,远远优于常规的跟随模式,人机交互自然融洽,安心、安全
2、不用时刻回头担心机器人是否跟丢或者遇到障碍物
3、环境复杂时,人可以自主选择更简单的行进路线来帮助机器人通行
强劲可靠的动力系统
柔韧自适应关节
1、全新专利设计的超轻量级低噪音长寿命动力关节
2、机身/大腿关节 C1-8:520g 23.70N.m (峰值)
3、膝关节 C1-8x1.5ratio 35.55N.m (峰值)
4、膝关节电机附近内置专利热管辅助散热系统
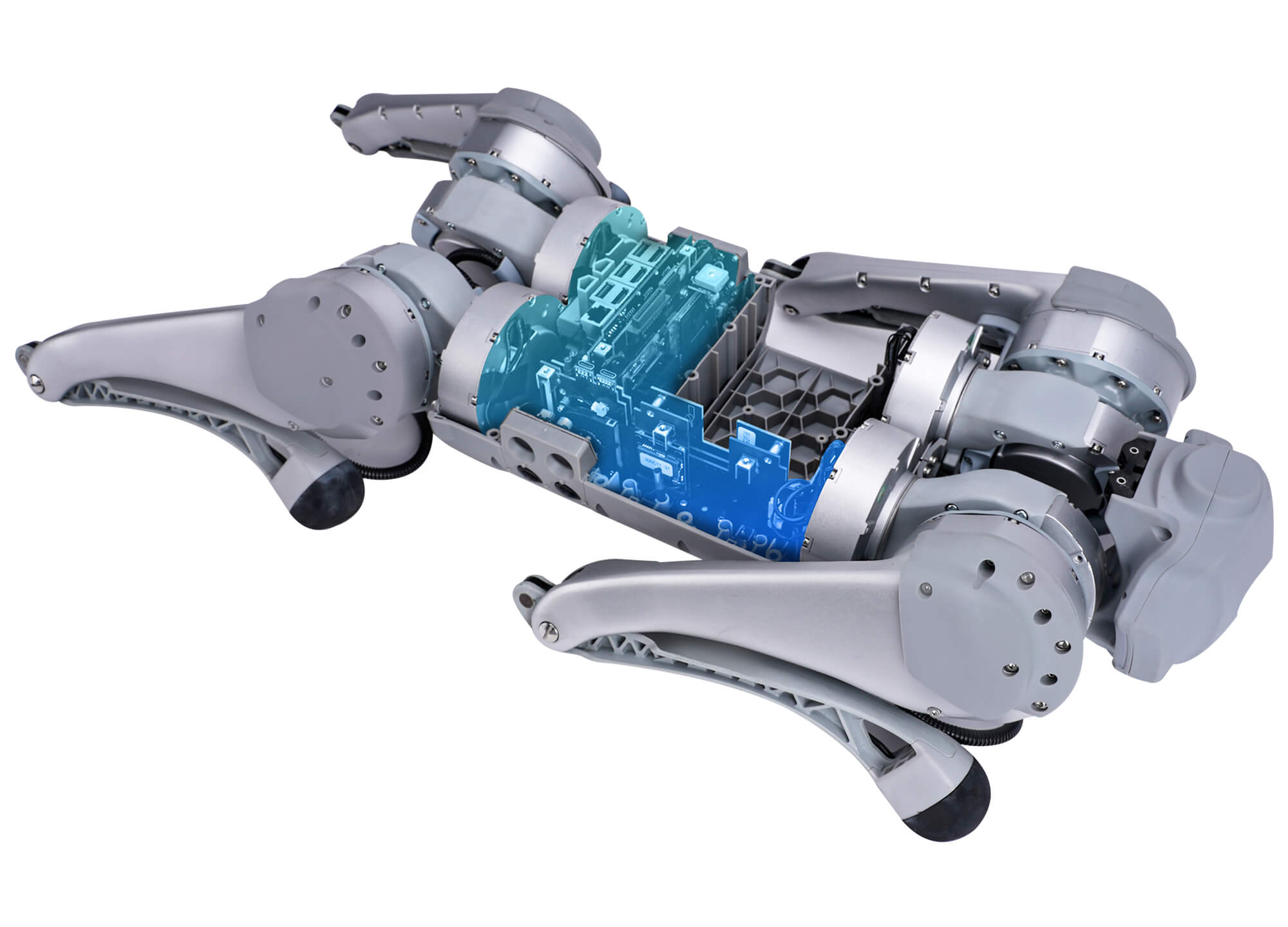
Go1内置超级AI算力
总计:16核CPU+GPU(384Core,1.5TFLOPS)
参看:TX2有CPU(4核)+GPU(256Core,1.3TFLOPS),单价 3000+ RMB




SSS 1
超感知系统
1对
5对
5对
5对
感知算力
1*(4*1.43GHz
128Core0.5T)
3*(4*1.43GHz
128Core0.5T)
3*(4*1.43GHz
128Core0.5T)
2Nano+ (1Nano
or 1NX)
ISS 1 智能伴随
●
●
●
●
RTT 1 图传
●
●
●
●
充电器
24V,4A
24V,6A
24V,6A
24V,6A
遥控器
●
●
●
●
载荷
≈4kg(极限 ~ 10kg)
≈4kg(极限 ~ 10kg)
≈5kg(极限 ~ 10kg)
≈6kg(极限 ~ 10kg)
热管辅助散热
●
●
●
●
运动速度
0 ~ 2.5m/s
0 ~ 3.5m/s
0 ~ 3.5m/s
0 ~ 3.7m/s
(极限 ~ 5m/s)
铝合金
精密关节电机
12个
12个
12个
12个
超大关节
运动空间
机身:-49~49°
大腿:-39~257°
小腿:-161~-51°
机身:-49~49°
大腿:-39~257°
小腿:-161~-51°
机身:-49~49°
大腿:-39~257°
小腿:-161~-51°
机身:-49~49°
大腿:-39~257°
小腿:-161~-51°
铝合金大腿
●
●
●
●
电池
1块
1块
2块
1块
图形编程接口
(后续升级提供)
●
●
●
●
科研编程接口
○
○
◐
●
Python编程
接口
○
○
◐
●
HAI 1
人体感知
○
○
○
●
APP上帝视角
○
●
●
●
4G
○
○
●
●
足端物理力
传感器
○
○
○
●
多功能外设
扩展接口
○
○
○
●
雷达
○
○
○
选配2D或3D
价格(含税)
1.6万
1.99万
联系销售
联系销售
保修期
6个月(核心零部件)
3个月(非核心零部件)
12个月(核心零部件)
6个月(非核心零部件)
12个月
12个月
请周知,用户实际到手的产品,在外观颜色,个别细节尺寸上会和本文中机器人有所差异。功能和性能指标和本文基本一致。
此前世界记录 MIT mini cheetah 3.7m/s;此速度是产品极限速度测试时跑出的速度,出于安全和稳定,实际客户到手的产品会被限速。如需在户外较长时间使用,请在凉爽的天气。使用时请人和机器人保持一定的安全距离,尤其请勿让未成年人碰触机器人。
由于主要是使用无线电信号进行矢量定位,当人和机器人之间有明显的遮挡时,有很大概率会使机器人丢失人的实际位置。故实际用户使用时,可以人为有意使人和机器人处于比较理想的行进路线。
为了使双目深度感知能正常工作,请确保环境光照条件良好,障碍物表面纹理丰富。超声波探头之间,存在相互干扰的可能,请确保机器人周边没有超声波发射装置。
当前时刻,一般默认只会有一个相机启用此功能。
由于人类生活环境过于复杂,在条件允许的情况下,请用户通过选择更开阔的路线,来尽可能减少机器人本身的自主规避功能的触发。
上帝视角主要是提供多方位的图像传输功能,方便用户使用APP控制时,查看机器狗的四周及地形情況。
本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
请访问宇树科技官网了解更多产品相关条款与政策,请遵守各地区法律法规。