



型号
H2-D 通用版
H2-D 旗舰版
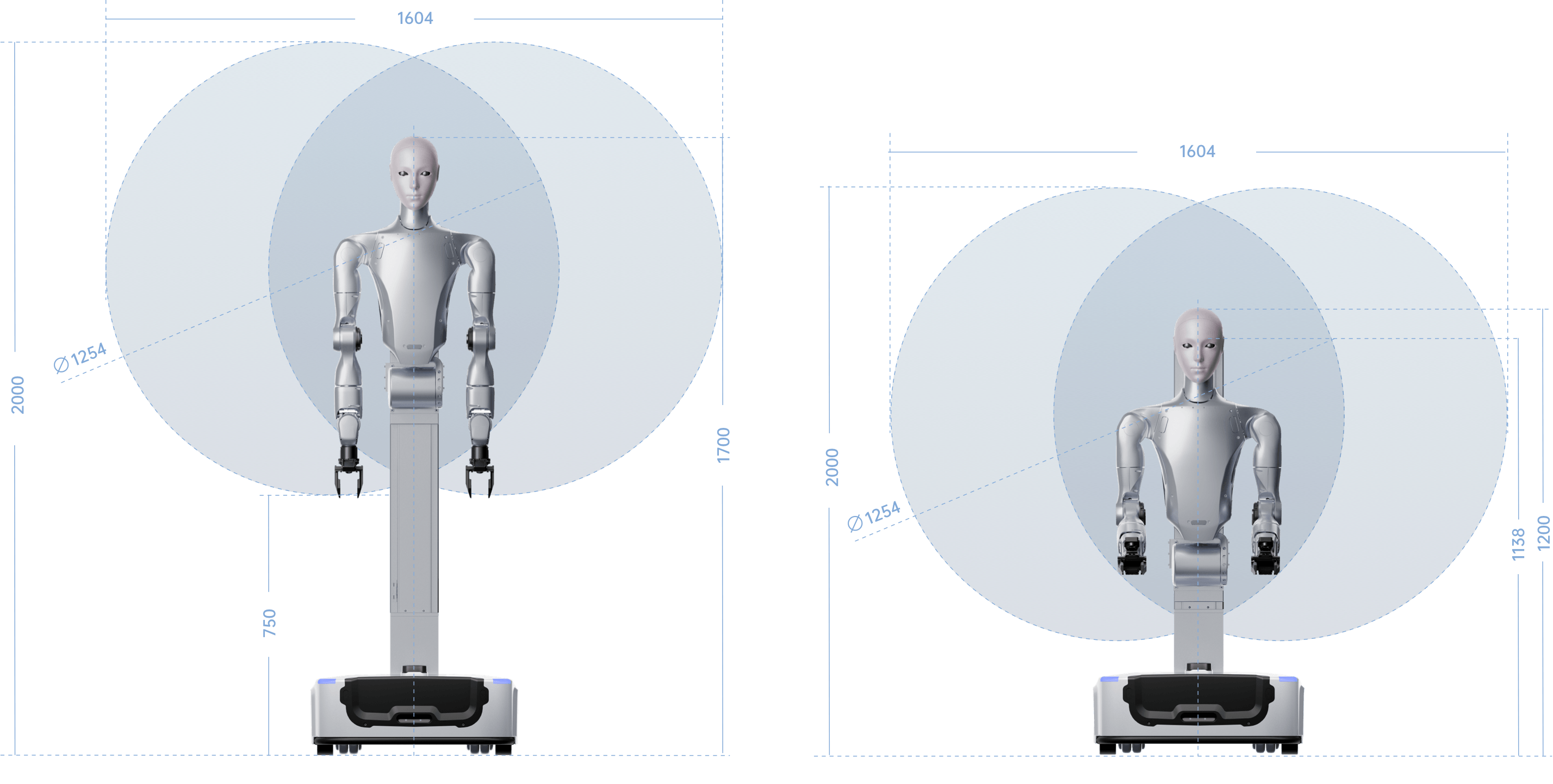
整机尺寸(立柱最低高度)
1200x576x620mm
1200x576x620mm
整机尺寸(立柱最高高度)
1700x576x620mm
1700x576x620mm
整机重量(含电池)
135Kg
135Kg
整机自由度(不含末端)
19
20
单臂自由度(不含末端)
7
7
单臂最大负载【1】
峰值:约15kg 额定:约7kg
峰值:约15kg 额定:约7kg
末端配置【2】
可选二指夹爪/三指灵巧手/五指灵巧手
可选二指夹爪/三指灵巧手/五指灵巧手
腰关节运动空间
pitch 0°-115°
pitch 0°-115°
升降速度
最大约200mm/s
最大约200mm/s
升降行程
0.5m
0.5m
单臂展(2指夹爪)
约0.62m
约0.62m
底盘移动速度
/
最大1.5m/s
底盘驱动形式
/
伺服电机,双轮差速,支持原地360°旋转
旋转直径
支持原地Z轴±90°旋转
旋转直径约0.75m
传感器
/
底盘激光雷达*1 + 底盘深度摄像头*1
+ 底盘物理碰撞传感器*2
+ 底盘超声传感器*2
基础算力
PC1:Intel Core i5(平台功能)
PC2:Intel Core i7(用户开发)
PC1:Intel Core i5(平台功能)
PC2:Intel Core i7(用户开发)
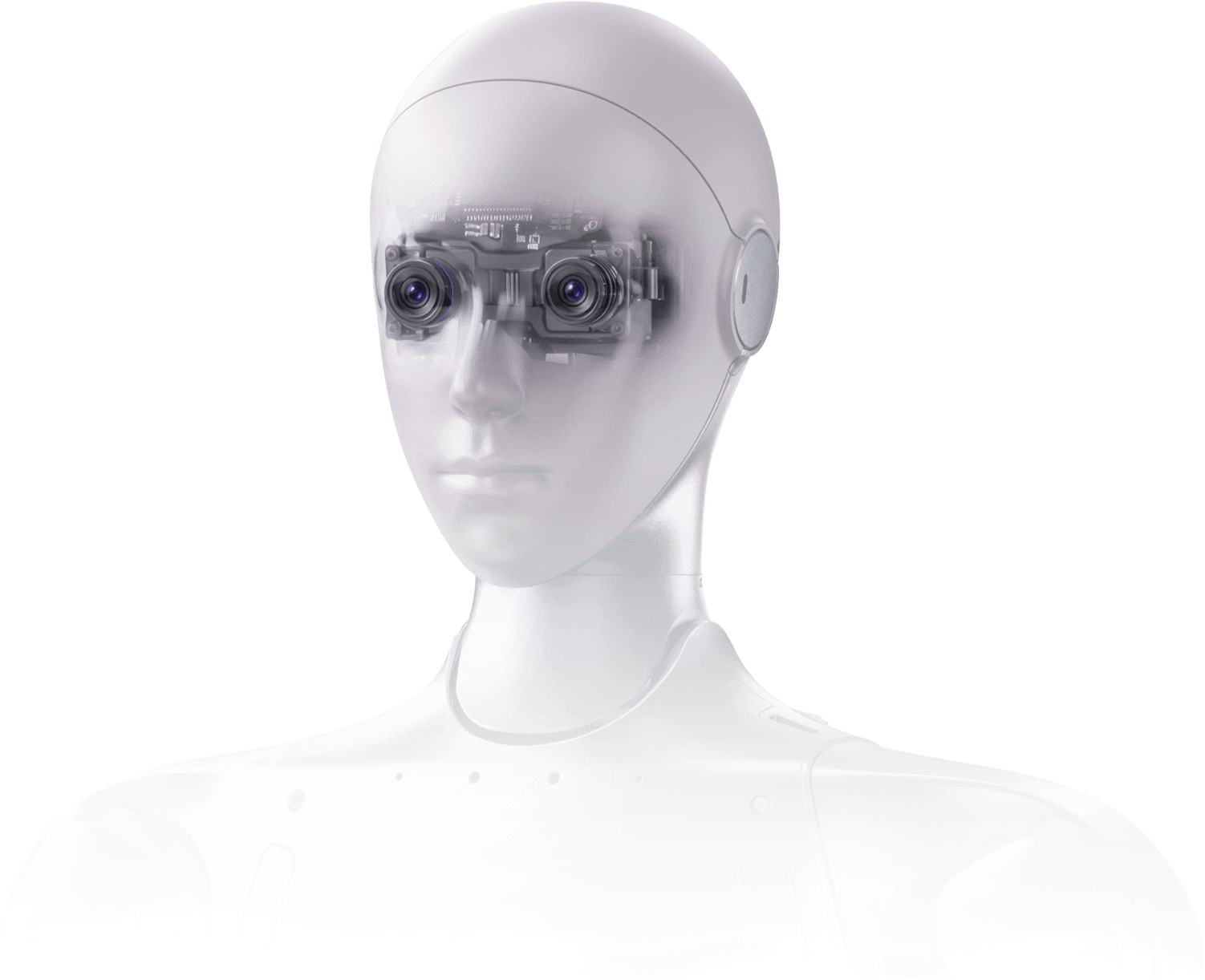
感知传感器
头部大视场角仿人双目相机*1
腕部高清相机*2
头部大视场角仿人双目相机*1
腕部高清相机*2
WiFi6、蓝牙5.2
有
有
高算力模组
多品牌多型号可选Thor 等
多品牌多型号可选Thor 等
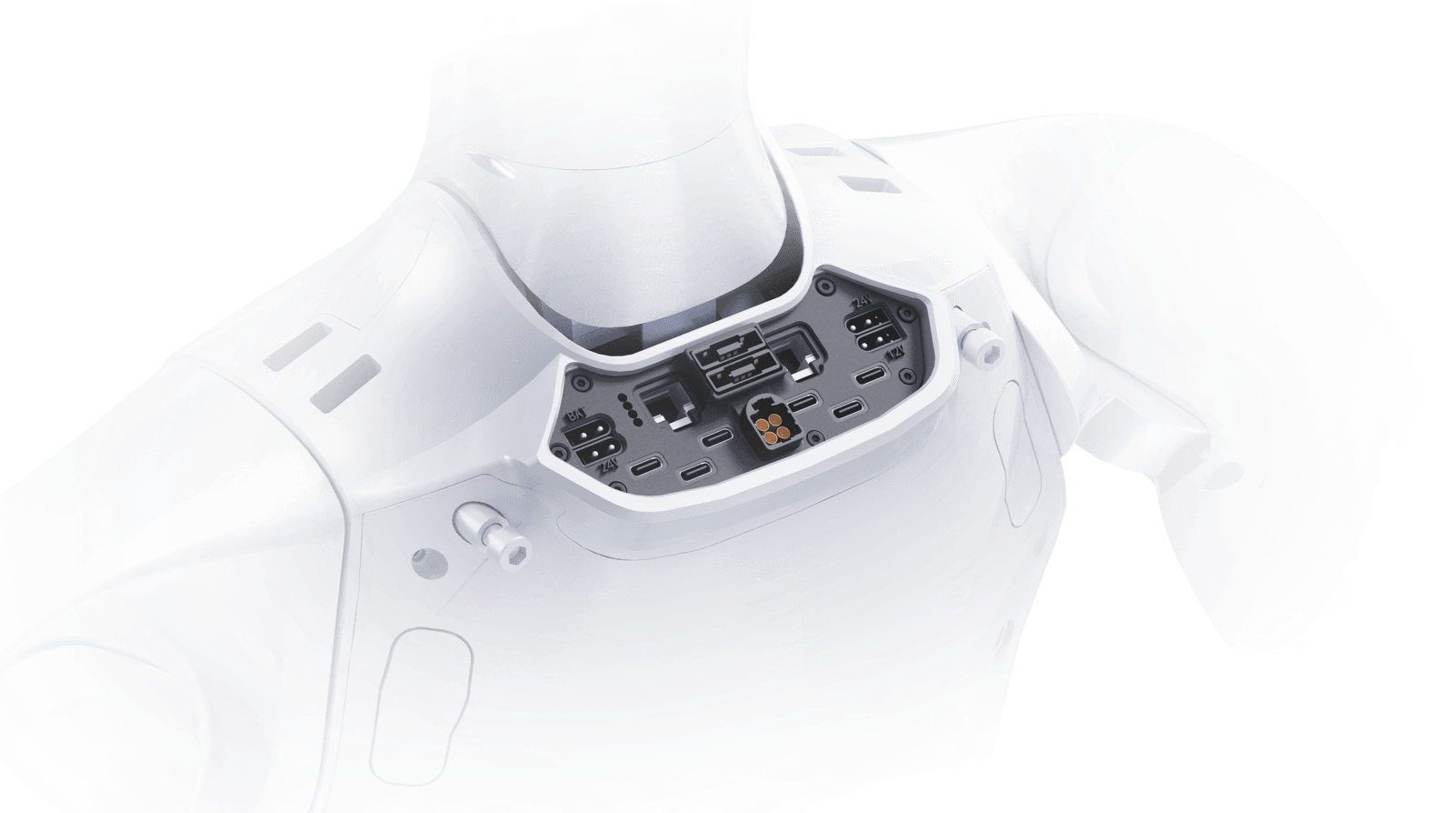
电池
电池快换:48V/18Ah(864Wh)
底盘电池(快拆):48V/30Ah(1.44KWh)
手持式遥控器
有
有
可视化电脑
有
有
续航时间
7*24H(直充供电)
约5H(支持电池更换/自动回充)
智能OTA升级
有
有
二次开发【3】
有
有
保修期
12个月
12个月