- 整机尺寸
φ 65*60
直径*长度(mm)
- 峰值扭矩
34.4 Nm
输出扭矩与转速方向相反
- 整机重量
535g
寸躯藏刚 力贯千钧

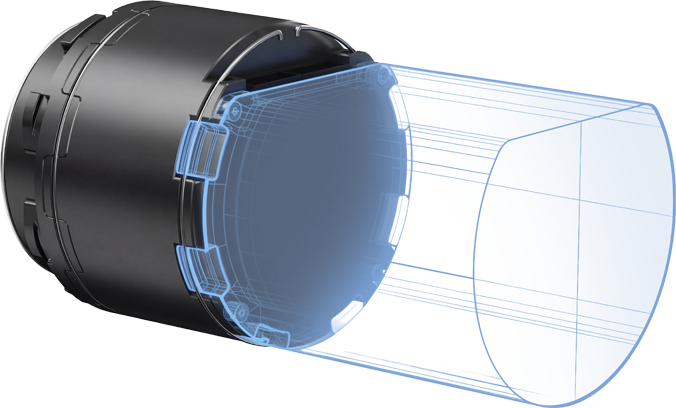
精工轴承
高精度 大承载 长寿命
PART 1

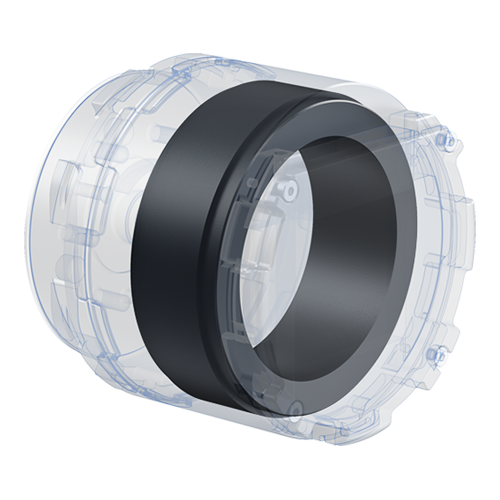
双编码控制
电机端编码 输出端编码
PART 2

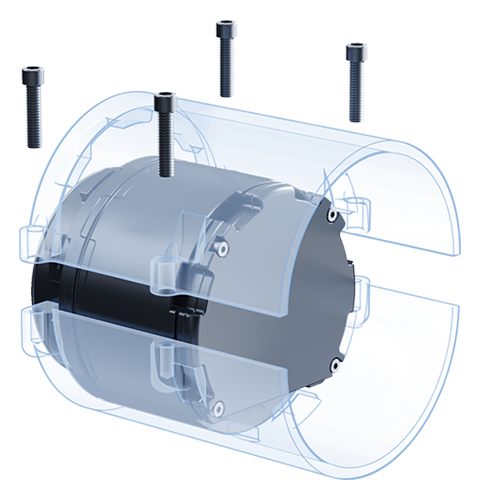
快速安装
低负载下可快捷拆装
PART 3
环抱安装
小体积大扭矩,专为高性能机器人关节设计。
是机器人大赛、DIY创作、科研教育、机器人领域的首选。
PART 4
动力如鸿
散热如风
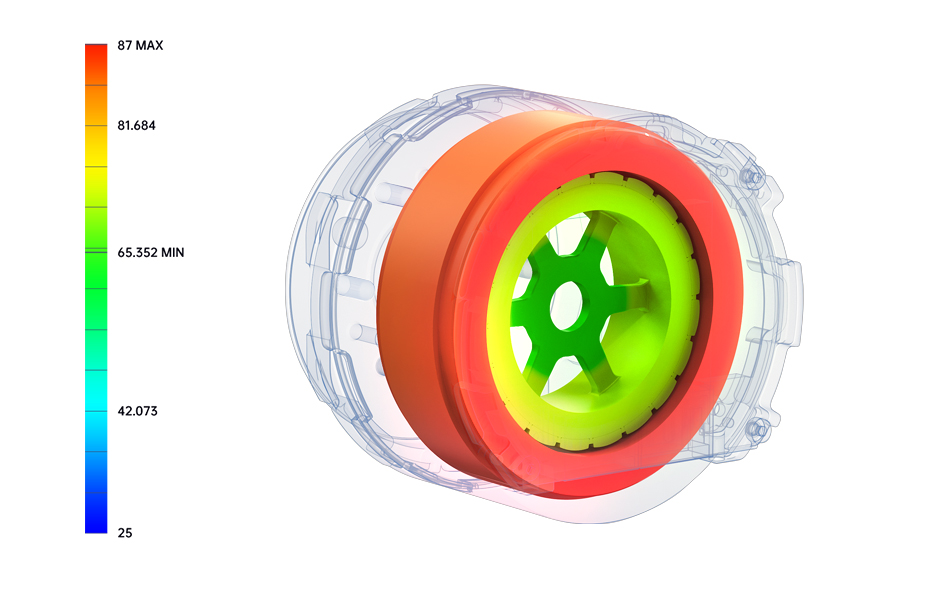
全新定子制造工艺
超高能量密度,扭矩密度约为普通电机的1.5倍。
强悍散热效率,可以输出更长时间的峰值扭矩。
PART 5
温度在手 准字当头
在电机高速换向过程中,通过自研温度场管理模型,每秒400次监控整机实时温度,榨干电机最后一丝扭矩。
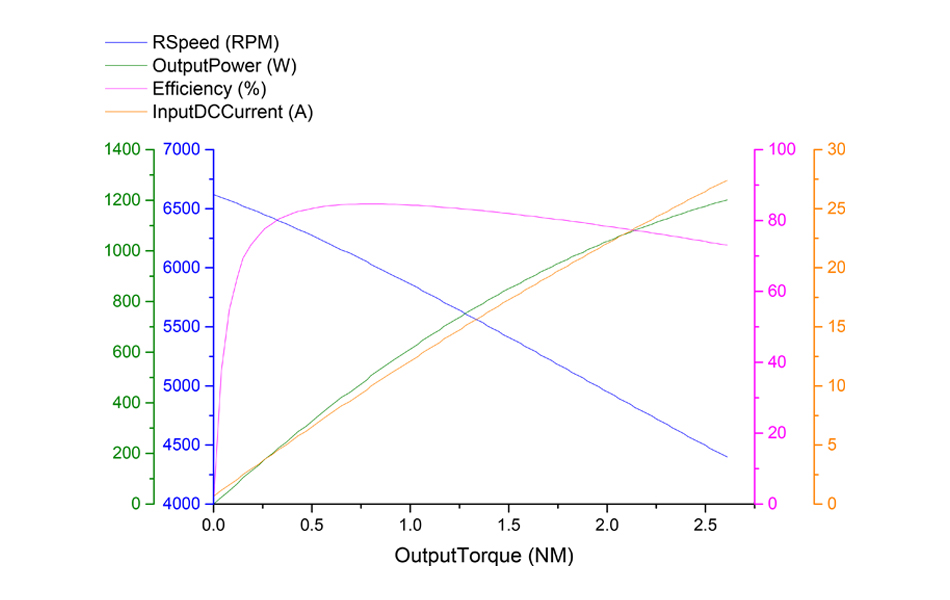
FOC控制曲线图
在25℃室温60V供电下,12.66的速比可为整机提供31.7Nm的峰值扭矩和54.2rad/s的转速。

四足机器人

人形机器人

小型机械臂
性能特点
电机型号
N6014B-12.6
电机重量
535g
电机尺寸
φ65*60mm
最大(空载)转速
54.2 rad/s(60v)
输入电压
24v~75v
减速比
3:38
最大线电流
40A
峰值扭矩
输出扭矩与转速方向相反
34.4N.m
峰值扭矩
输出扭矩与转速方向相同
31.7N.m
工作温度
Min
-20℃
Max
驱动板超过90度停机并报过热错误
绕组超过130度停机并报过热错误
其他
波特率
6000000bps/4000000bps
控制算法
混合控制
齿轮材料
金属
外壳材料
铝合金+高强度工程塑料
编码器分辨率
15bit
协议类型
高速485通信
(8bit, 1stop, No Parity)
链接(物理)
485多点总线
ID
0-14
位置传感器
转子、输出端、双绝对值编码器
指令信号
电机ID、工作模式、超时保护、前馈扭矩、目标速度、目标位置、位置刚度、速度刚度
电机反馈
力矩、角度、角速度、温度、电压、错误状态
电机控制
力矩、角度、角速度、前馈扭矩、位置刚度、速度刚度
质保
3个月
本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
请访问宇树科技官网了解更多产品相关条款与政策,请遵守各地区法律法规。